kintzhao
kintzhao
真值基本这样的 $ rosrun tf tf_echo /laser /middle_depth_optical_frame At time 1658549856.810 - Translation: [0.225, 0.033, 0.878] - Rotation: in Quaternion [-0.636, 0.636, -0.310, 0.310] in RPY (radian) [-2.234, 0.000, -1.571] in...

yhzhao@yhzhao:~/dataSets/3D$ rosbag play mid100_example.bag --clock yhzhao@yhzhao:~/3d_lidar_ws$ roslaunch loam_livox rosbag_mid100.launch ... logging to /home/yhzhao/.ros/log/63199d08-7df1-11ea-9e2a-98eecb94140d/roslaunch-yhzhao-29424.log Checking log directory for disk usage. This may take awhile. Press Ctrl-C to interrupt WARNING: disk usage...
CMake Error at CMakeLists.txt:101 (get_target_property): get_target_property() called with non-existent target "Sophus::Sophus". https://github.com/dongjing3309/minisam/issues/1 I have the same question, which version of sophus is necessary ? my sophus is a621ff2e56c56c839a6c40418d42c . 1....
As paper [Simultaneous Calibration of Odometry and Sensor Parameters for Mobile Robots](https://www.researchgate.net/publication/260634803_Simultaneous_Calibration_of_Odometry_and_Sensor_Parameters_for_Mobile_Robots)  why m12=0 m23 =0 m45 = 0? How to infer Matrix M ?
[ 93%] Building CXX object mesh_navigation/mbf_mesh_nav/CMakeFiles/mbf_mesh_server.dir/src/mesh_planner_execution.cpp.o [ 96%] Built target rviz_map_plugin [ 96%] Building CXX object mesh_navigation/mbf_mesh_nav/CMakeFiles/mbf_mesh_server.dir/src/mesh_recovery_execution.cpp.o [ 96%] Built target mbf_simple_nav [ 98%] Built target mbf_costmap_server [ 98%] Built...
The result path may hit the obs.  test map file [test map file narrow_test-nav.zip](https://github.com/LiJiangnanBit/path_optimizer_2/files/10401553/narrow_test-nav.zip)
I modify some code to make it for the differential robot, but it has some error by bounds. How to modify the code ? modify codes ` cv::Mat img_src =...
how to fixed the target pose, make the smooth path align with the target
roslaunch mini_snap_opt run_minimum_snap_2d.launch path_skip_num:=10 max_vel:=1.2 max_accel:=2.0 order:=4 我修改了代码包,订阅navigation里面的路径(dijkstra+b样条平滑),按照path_skip_num间隔取点作为waypoint。发现出来的路径跟原路径的差别不是太大,有些调整的扭动反而不是太好。 你可以帮看看, 这个是否存在改进的地方? 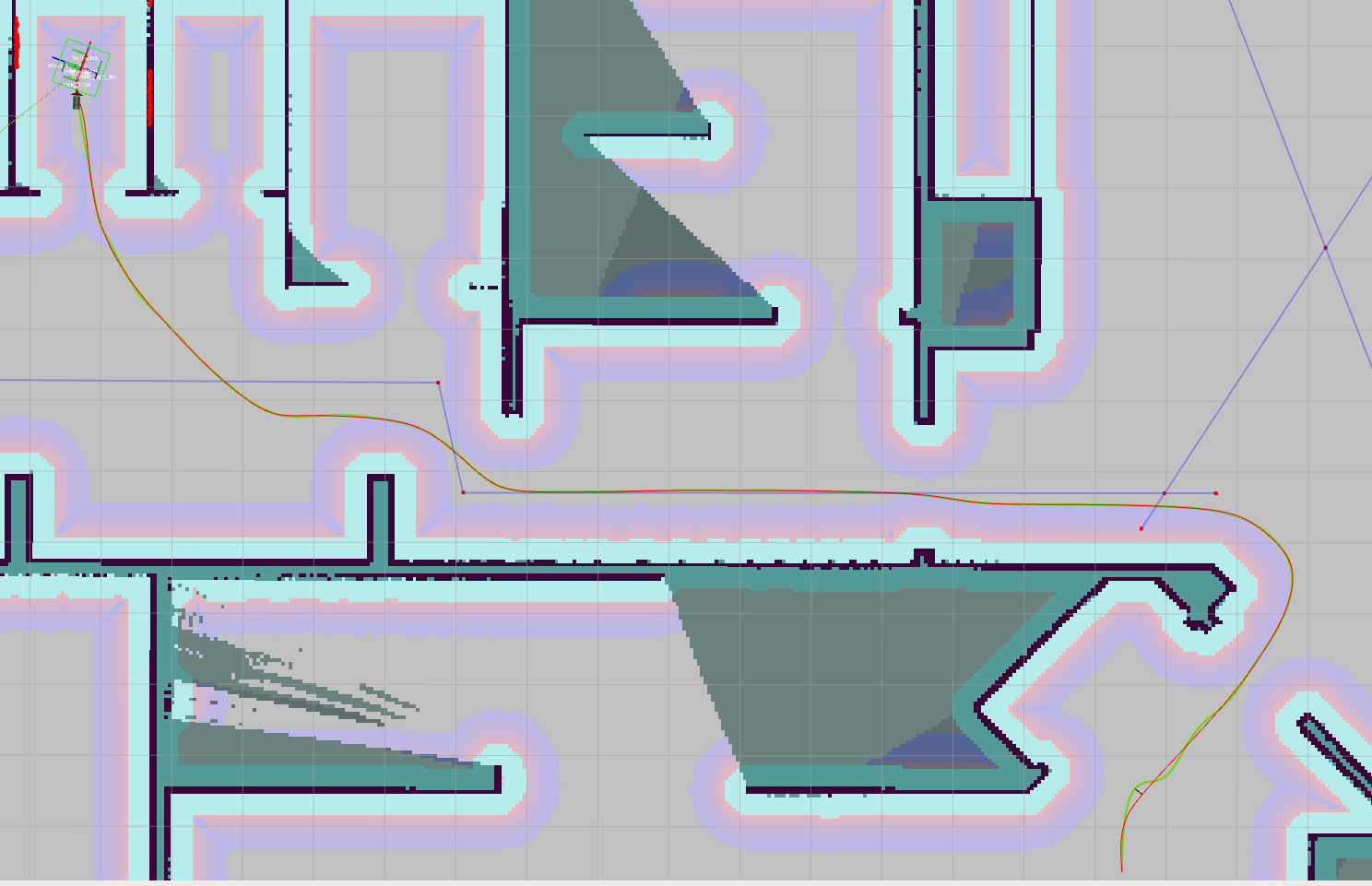  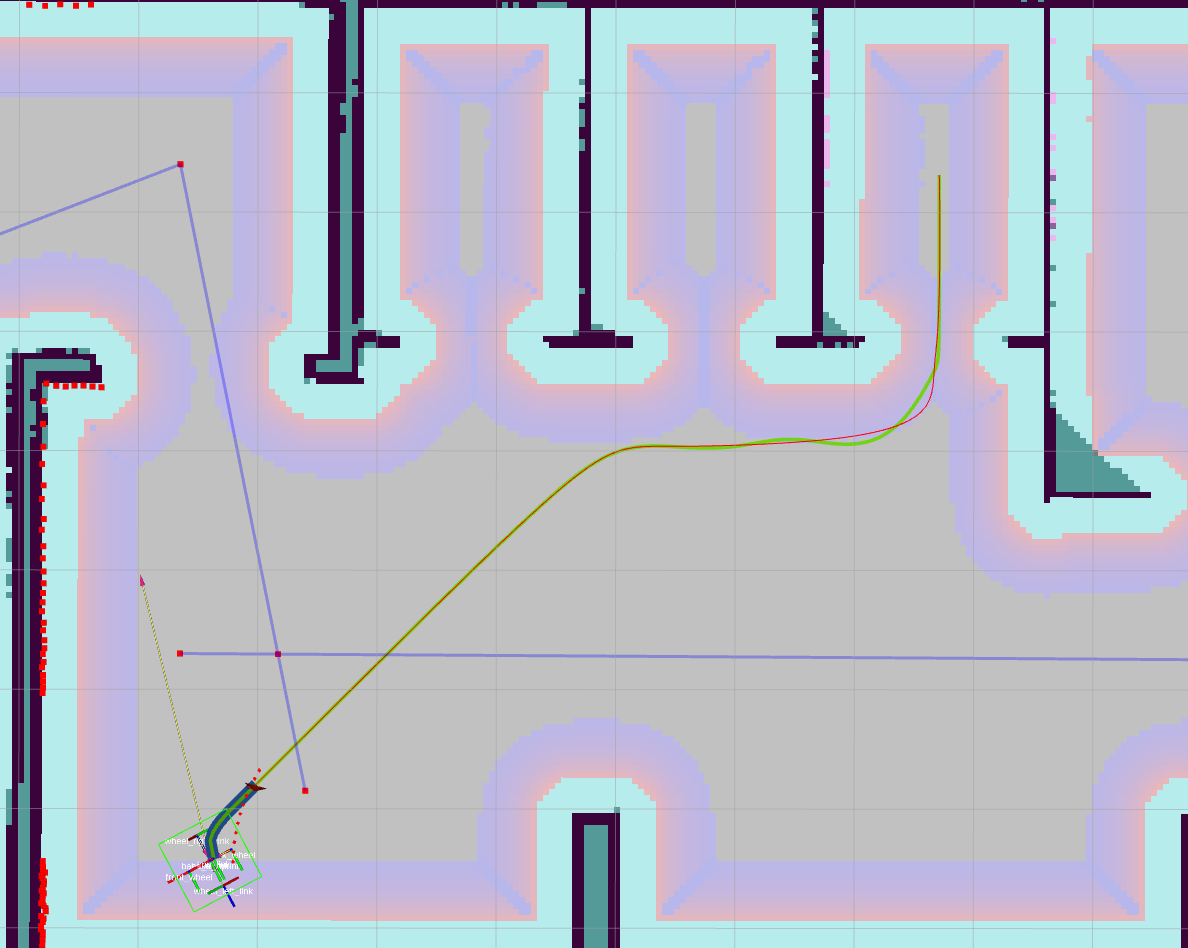 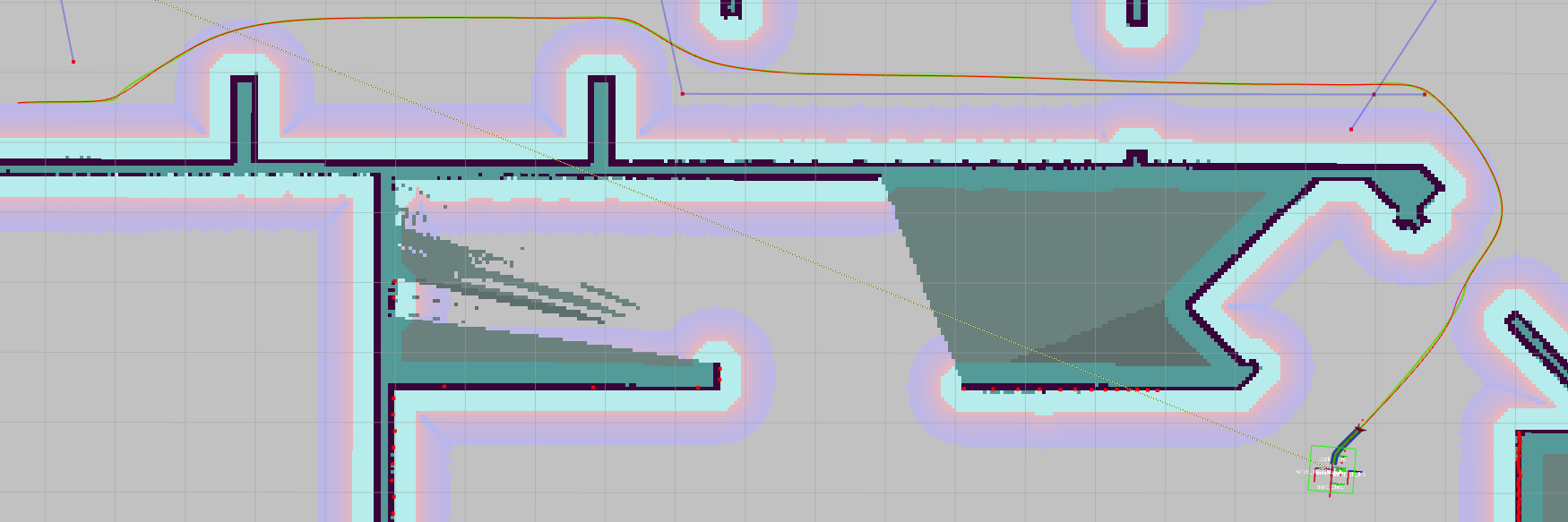 void PathSubscriber::MessageCallBack(const nav_msgs::PathPtr &path_msg_ptr)...
triangle motion, 0.5*a*(0.5*t)^2 = 0.5s so, segment_t = 2*std::sqrt(delta_dist / max_accel_);