Ran Bao
Ran Bao
I came across this idea when working on my ERCF code. Hopefully my proposed solution could improve the overall robustness of the selector motion. The idea is to mimic the...

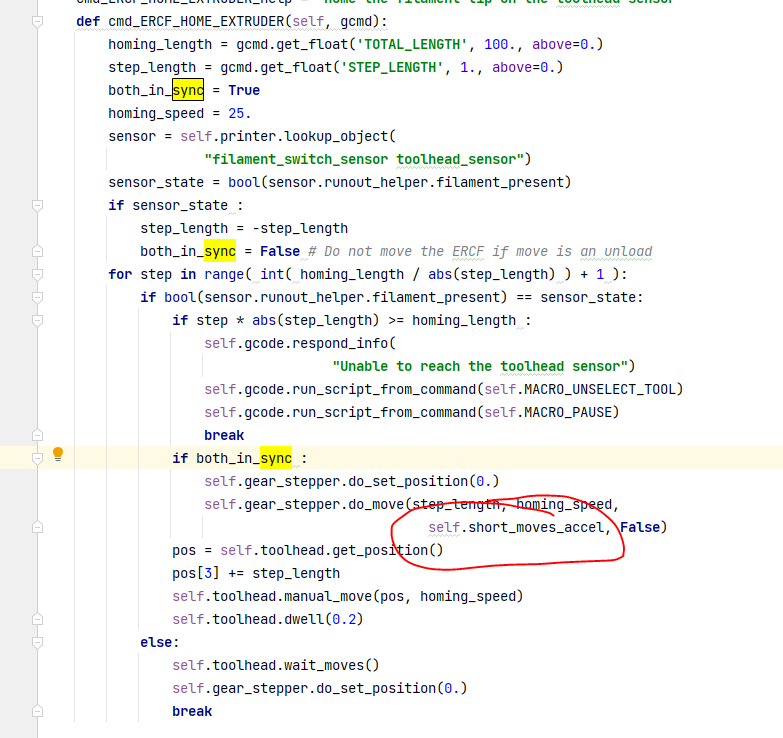 When toolhead and gear stepper is asked to move synchronously, the short move acceleration is specified to the gearstepper while the toolhead keeps its own acceleration. I suspect this...
Discussed under https://github.com/EtteGit/EnragedRabbitProject/issues/131 The "timer too close" is still under investigation. However synchronizing the toolhead extruder and the gear stepper is a quality-of-life improvement making sure two steppers are moving...
Please correct me if I'm wrong. I noticed the function `_ERCF_FORM_TIP_STANDALONE` sets the pressure advance to 0 as the part of the sequence. However the pressure advance value isn't restored...
Hello All Given the FreeRTOS v11 is released at the end of 2023, the pico-sdk,especially the functions that supports SMP, needed to be updated to support the new flag to...
The example code from https://github.com/raspberrypi/pico-examples/blob/master/pico_w/wifi/access_point/picow_access_point.c#L293 shows the default IP address for the DHCP server is 192.168.4.1. When I changed the subnet to, for example, 192.168.3.1, my TCP client could not...