Filip Sund
Filip Sund
If Stefan has abandoned AltDrag he could transfer the repo to Ramon or perhaps add a link to Ramon's version.
Can anyone confirm this? I was considering a Dactyl, but was planning on using Kailh BOX switches. Do they not fit in the hole at all, or are they just...
To make the Dactyl compatible with Kailh switches you can just edit [line 37 of src/dactyl_keyboard/dactyl.clj](https://github.com/adereth/dactyl-keyboard/blob/master/src/dactyl_keyboard/dactyl.clj#L37) and remove the `side-nub`. Replace plate-half (union top-wall left-wall (with-fn 100 side-nub))] with plate-half...
Same issue here. I only get this in the Home Assistant app. This is a screenshot from the Android app on a Galaxy S10. 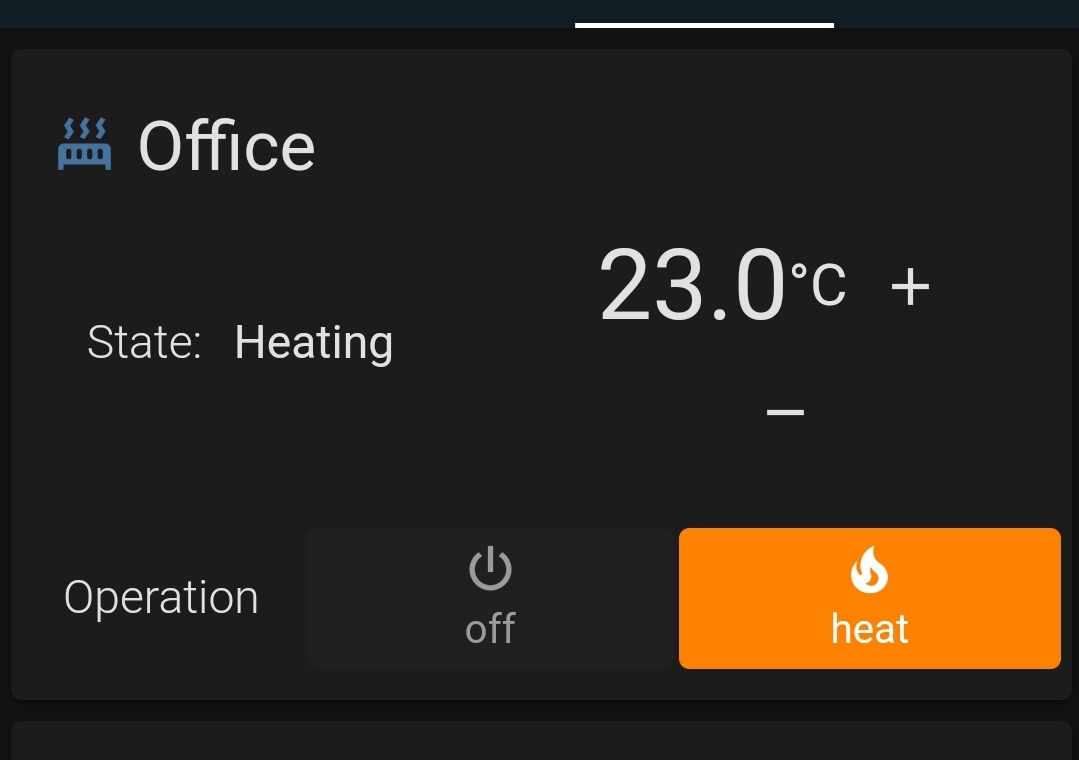
For our application we depend on octomap collision checking as well (which is disabled in `servo_server`), so we will most likely just implement our own `servo_server`. I think at the...
I'd vote for both the tutorial and the header. I'm not sure what the best way to add it to the tutorials is. Perhaps a new launch-file that includes the...
Based on some quick testing, this seems to be the case for both `occupancy_map_monitor/DepthImageOctomapUpdater` and `occupancy_map_monitor/PointCloudOctomapUpdater`.
In short, the "Free Voxels" appear much farther out than what I set as `max_range`, but "Occupied Voxels" only appear within the limit. I will try to produce some screenshots...
I have attached some screenshots that show the issue. I have set `max_range` to 5 meters, which correlates well to the walls shown in Occupied Voxels. The walls are at...
> The `DepthImageOctomapUpdater` does not have a `max_range` parameter, only `far_clipping_plane_distance`. Did you test this parameter instead? The screenshots you shared look rather like your sensor does not provide a...