onionysy
onionysy
我将此处标定参数直接写死解决了这个问题,但是在自己数据集上运行过程中,在“seg.segment(*inliers, *coefficients);”时ros节点直接死掉了。您那里能针对我这边的问题给出一定的意见吗,谢谢您。 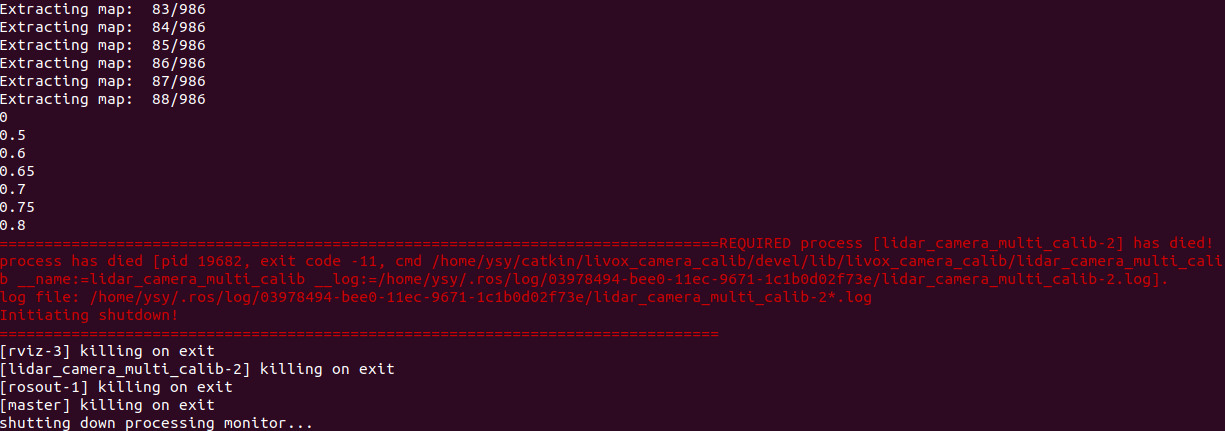 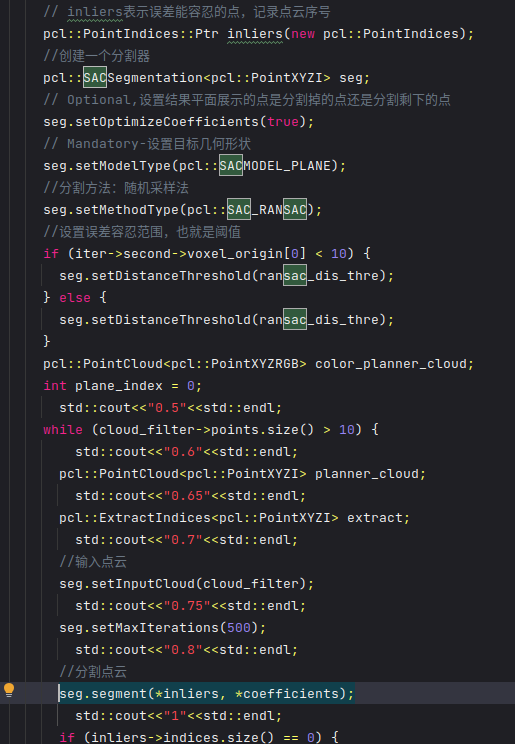 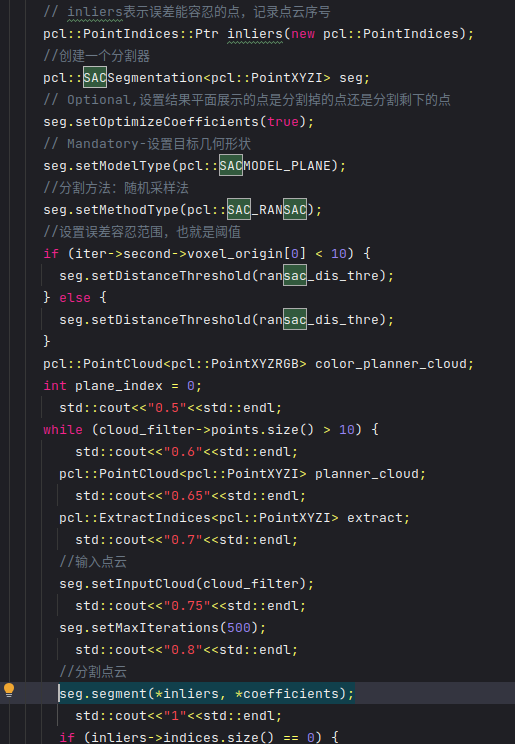
我将此处标定参数直接写死解决了这个问题,但是在自己数据集上运行过程中,在“seg.segment(*inliers, *coefficients);”时ros节点直接死掉了。您那里能针对我这边的问题给出一定的意见吗,谢谢您。   
我这里使用的是pcl1.8版本,是必须要使用1.7或者1.9才可以吗?同时,我这里也打印了ransac_dis_thre,是有值的0.02。 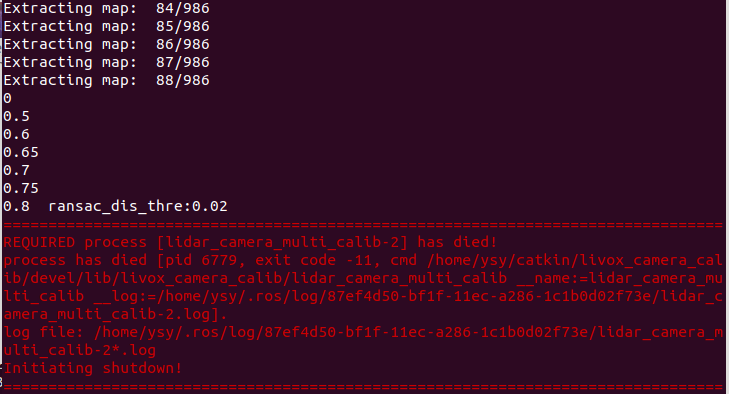 > > 我将此处标定参数直接写死解决了这个问题,但是在自己数据集上运行过程中,在“seg.segment(*inliers, *coefficients);”时ros节点直接死掉了。您那里能针对我这边的问题给出一定的意见吗,谢谢您。    > > 你好,请问这个pcl版本是多少呢,我在1.7和1.9上测试过都是没问题的;同时,可以打印下ransac_dis_thre是否有值 我使用的pcl1.8,这是需要将pcl版本改为1.7或者1.9才可以吗?同时,我也打印了ransac_dis_thre,其值为0.02。 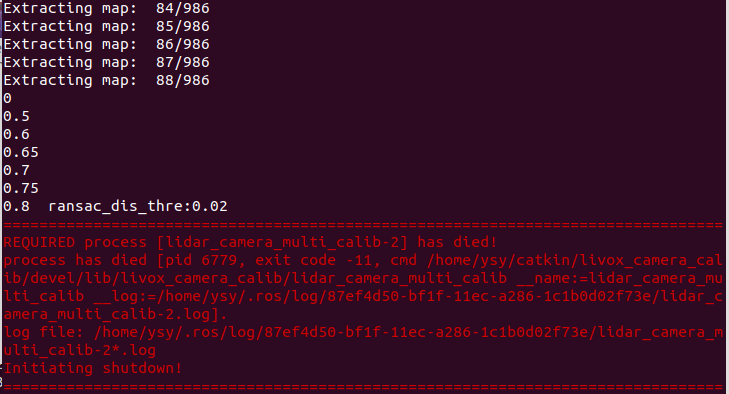
> > Also, how to visualize GT voxel in `OpenOccupancy/data/nuScenes-Occupancy/v0.0-base/scene_aa45d94630be481787f20121ce89a605/occupancy/548ca66e9adc48ca88d1bcaeeafc35da.npy` Thanks! > > shape: (136774, 4) > > The Visualization code is being reframed (might be released in the future),...
> > Also, how to visualize GT voxel in `OpenOccupancy/data/nuScenes-Occupancy/v0.0-base/scene_aa45d94630be481787f20121ce89a605/occupancy/548ca66e9adc48ca88d1bcaeeafc35da.npy` Thanks! > > shape: (136774, 4) > > The Visualization code is being reframed (might be released in the future),...
合并左右curb?您所说的是Anchor3DLane-main/tools/convert_datasets/openlane.py中第251-252两行代码吗?似乎和我理解的不太一样?
