Kosuke Takeuchi
Kosuke Takeuchi
skip_optimization=false 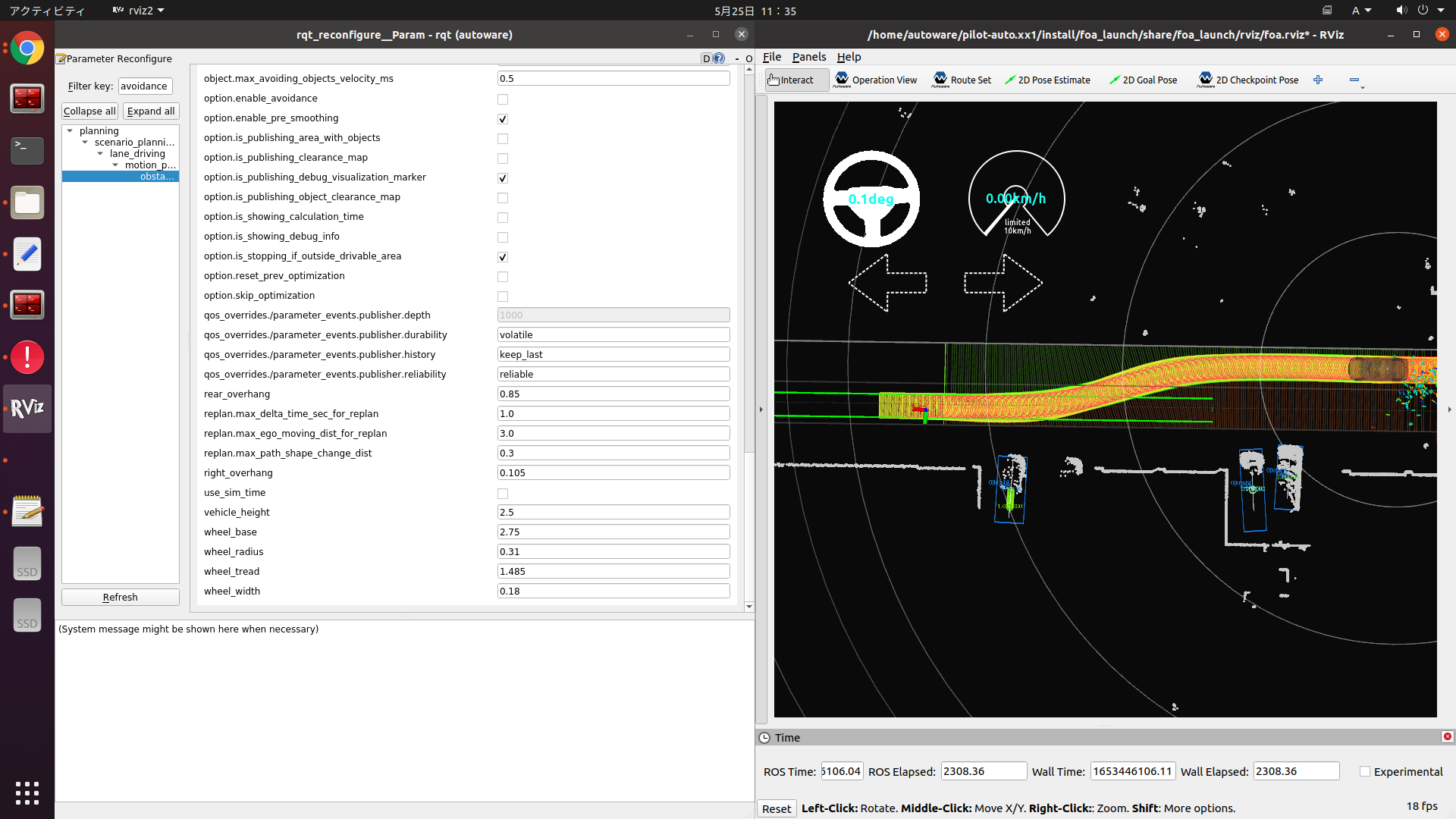 skip_optimization=true 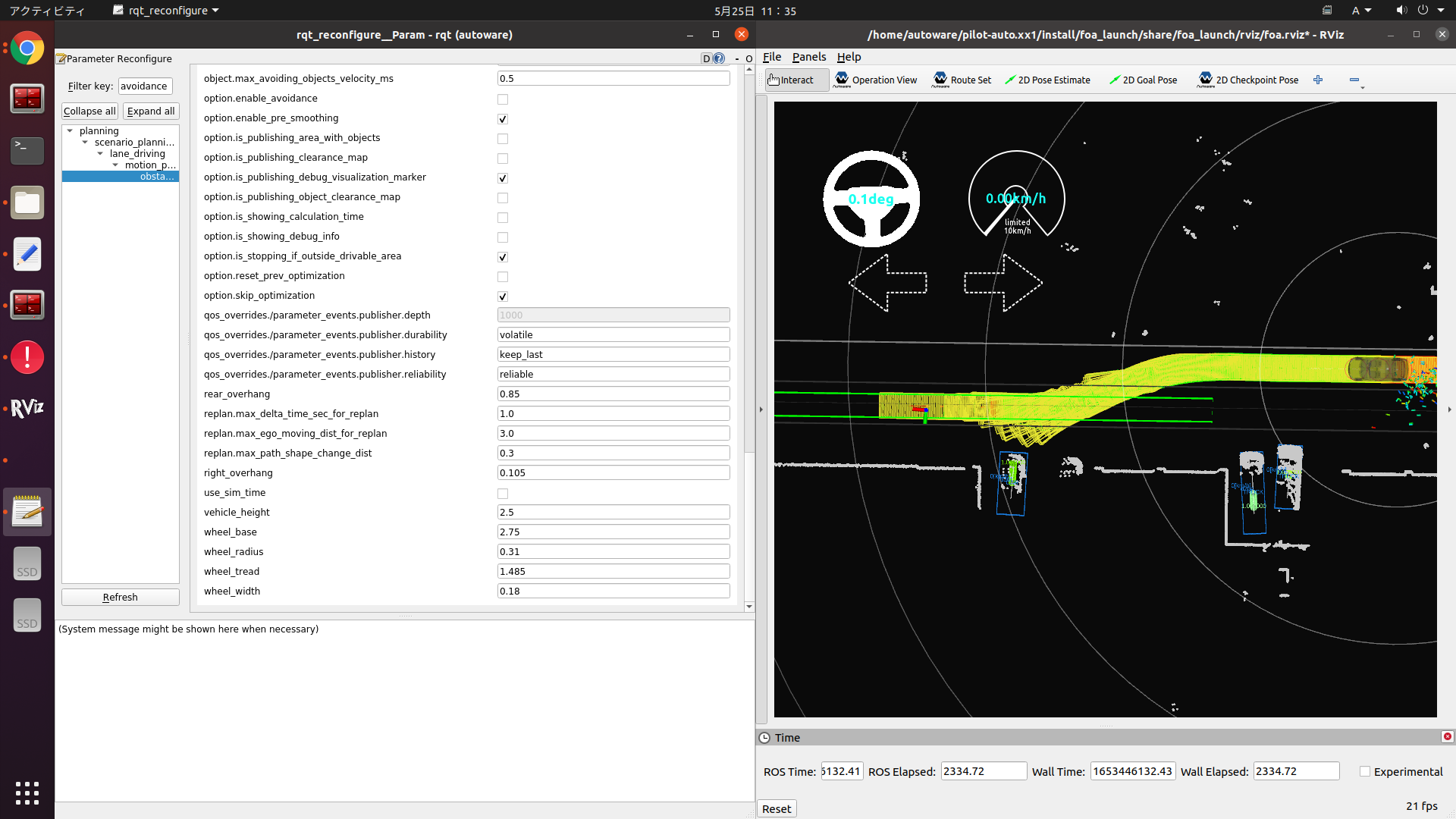
@mitsudome-r @takayuki5168 Any map(like [sample](https://autowarefoundation.github.io/autoware-documentation/main/tutorials/ad-hoc-simulation/rosbag-replay-simulation/#steps)) can be used, just set skip_optimization to true(use rqt_reconfigure or edit launch file) and draw a path with curves. https://user-images.githubusercontent.com/39142679/174250077-60972945-280d-4340-a043-5257bd48b232.mp4
@tkhmy OK, I will check them.
@TakaHoribe Could you please approve it as a code owner for merging?
@brkay54 How about enabling the following options? - [keep_steer_control_until_converged](https://github.com/autowarefoundation/autoware.universe/blob/main/launch/tier4_control_launch/config/trajectory_follower/lateral_controller.param.yaml#L60) - [enable_keep_stopped_until_steer_convergence](https://github.com/autowarefoundation/autoware.universe/blob/main/launch/tier4_control_launch/config/trajectory_follower/longitudinal_controller.param.yaml#L9)
The reason why vertex_offset=0 generates an incorrect voxel is that trianglemesh_to_voxelgrid has normalize = True by default, and the mesh range is -0.5 ~ 0.5. https://github.com/NVIDIAGameWorks/kaolin/blob/ec193fff54bd073cf8cdafaa0fc5f03f7d23e28c/kaolin/conversions/meshconversions.py#L77-L80 It is then multiplied...
@maximilianwulf OK, please wait.
@maximilianwulf I fixed `CalculateElevation` unit test. https://github.com/ANYbotics/grid_map/pull/329/commits/0a234582a0318378aa3b4de522c89b6954fd85cb
@maximilianwulf I fixed according to your comment, so please check it.
ping @maximilianwulf