Alan Federman
Alan Federman

As far as I can tell, the kinetic branch works in noetic, and the only thing that needs changing is the documentation. We need to explain the different camera mounting...
raceback (most recent call last): File "/home/ubuntu/catkin_ws/src/demos/fiducial_follow/nodes/follow.py", line 35, in from fiducial_msgs.msg import FiducialTransform, FiducialTransformArray ImportError: cannot import name 'FiducialTransform' from 'fiducial_msgs.msg' (unknown location) no error when tried on AMD...
move_patterns.py is still on python, not python3
see figures included. quaternion errors in rviz, markers are located below the ground plane and 90 degrees from Magni robot 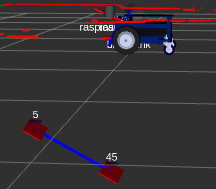 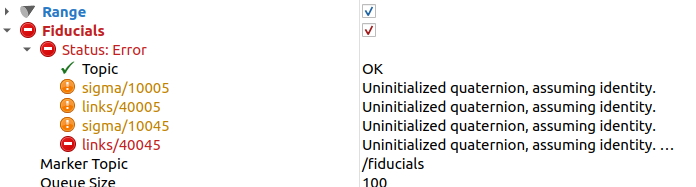 .
I was able to apt install and get working on a Raspberrypi 4 arm64 Ubuntu 20.04 On the Nano catkin_make --pkg usb-cam worked without errors or warnings, but launch the...
The camera when installed as per the docs shows it is upside down in rqt-image-view.
/home/ubuntu/catkin_ws/src/fiducials/aruco_detect/src/aruco_detect.cpp:605:58: error: ‘struct cv::aruco::DetectorParameters’ has no member named ‘doCornerRefinement’ 605 | pnh.param("doCornerRefinement",detectorParams->doCornerRefinement, true); /* default false */ | ^~~~~~~~~~~~~~~~~~ make[2]: *** [fiducials/aruco_detect/CMakeFiles/aruco_detect.dir/build.make:63: fiducials/aruco_detect/CMakeFiles/aruco_detect.dir/src/aruco_detect.cpp.o] Error 1 make[1]: *** [CMakeFiles/Makefile2:7871: fiducials/aruco_detect/CMakeFiles/aruco_detect.dir/all] Error...
Even in simulation, it appears that markers have to be located on the ceiling. Even If I set the camera to look at wall mounted markers, it show their location...
Since binaries for ARM 64 don't exist, we need docs to add in catkin. Especially usb setup.
https://drive.google.com/file/d/13rZr6WvJyQTN6nPpjQd4De3GtmNIorb4/view?usp=share_link This video show the issue in rviz. You also can demonstrate by selecting camera forward in magni_bringup (default.yaml) and running: roslaunch magni_gazebo fiducial_world.launch When you do this you will...