ERROR: LoadError: UndefVarError: Model not defined
When I run the examples, they are all illustrating that: ERROR: LoadError: UndefVarError: XX not defined. I am new to Julia, could you please tell me what's wrong with it?
hi!
I am not sure which script you are trying to run, but in order to run most of the scripts in this repository you will need to set the environment and module to motion_planning. This can be done using an IDE like VSCode or Atom.
At this stage, the repository is not set up like a normal Julia package. It primarily exists so I can easily share code with collaborators.
Please let me know if there is a specific example that is not working and I can make sure it runs.
Hi, there are some definition errors, and I am sure that I have already set the module to motion_planning. For example,
-
I run the code
/examples/implicit_dynamics/examples/planar_push_rotate.jl. There is an error calledERROR: LoadError: UndefVarError: J not defined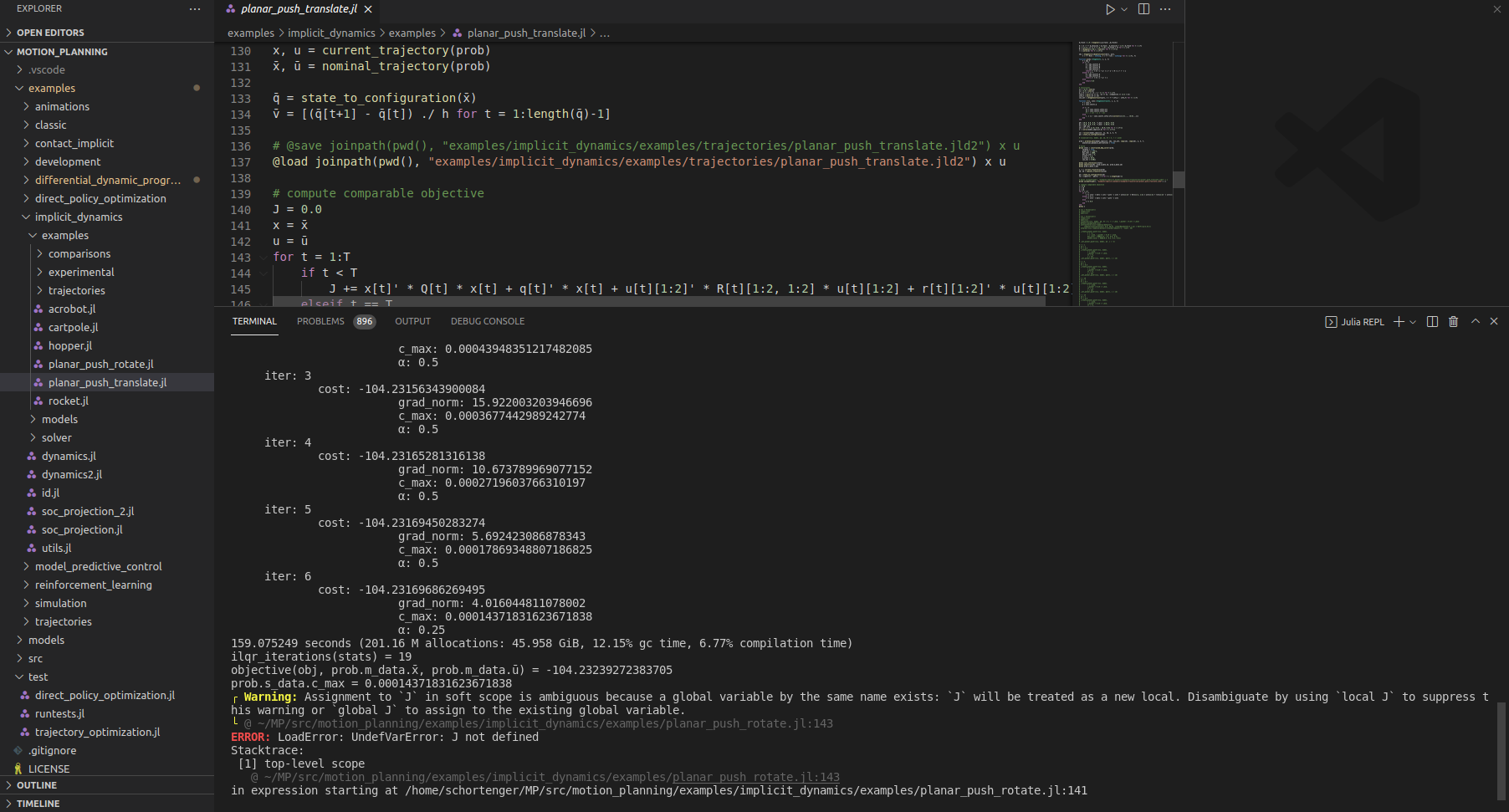
-
I run the code
examples/model_predictive_control/acrobot.jl. There is an error calledERROR: LoadError: type QuatRotation has no field x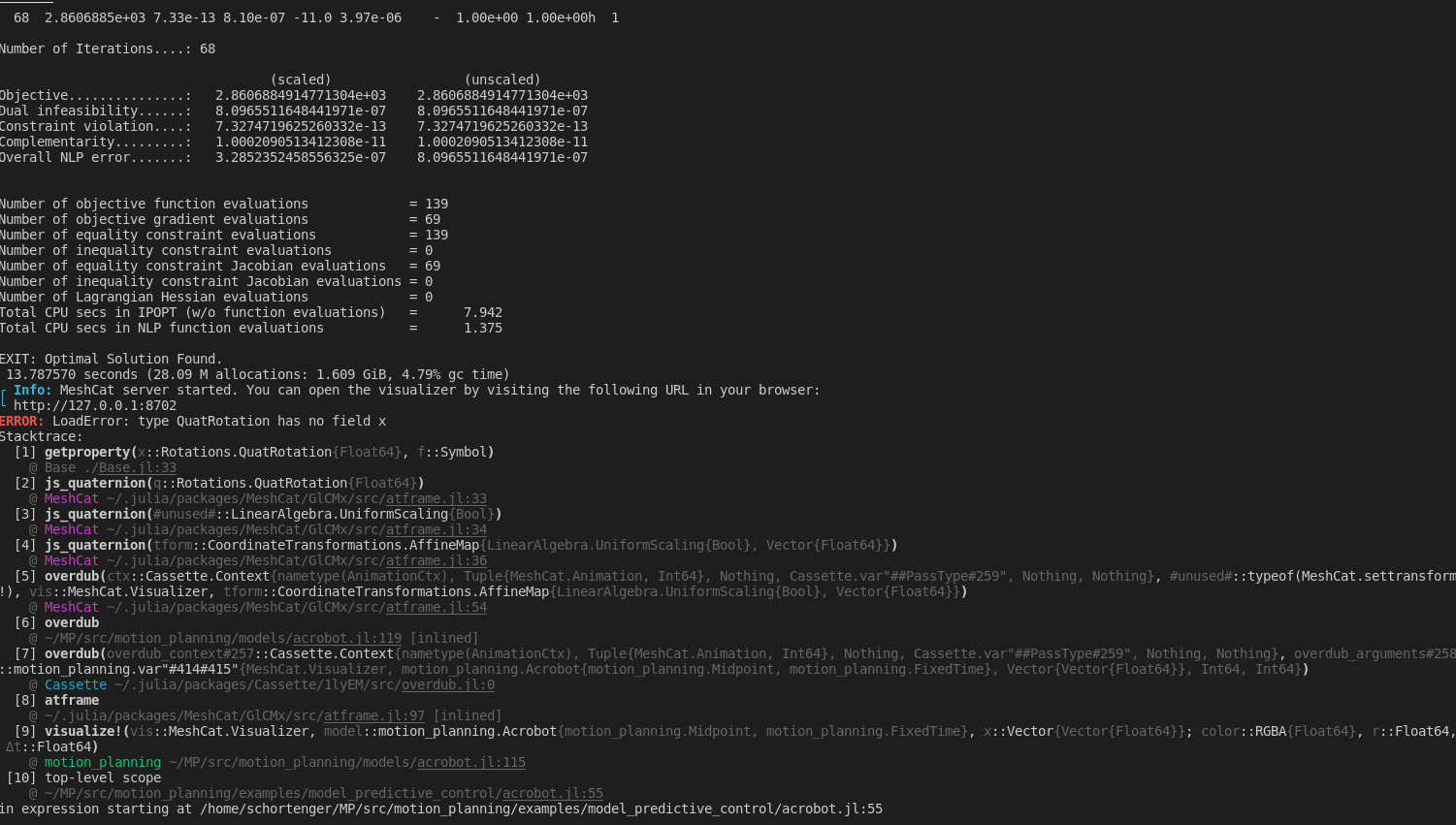
Almost all of the code has some error called LoadError. Do you know what's wrong with it?
- Looks like some sort of scope issue. I am in the process of moving the implicit dynamics examples into a separate repository to go along with the paper. This should be complete in the next week or two.
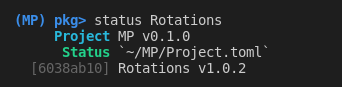
- This issue is related to Rotations.jl recently changing UnitQuaternion -> QuatRotation. For now you can enforce the package version for Rotations.jl as v1.0.2. I need to set up compat for motion_planning to prevent issue like this in the future.
Hi, I have already reinstalled the Rotation pkg as v1.0.2 by Pkg.add(name="Rotations", version="1.0.2"),
 Then I run the code from
Then I run the code from motion_planning/examples/implicit_dynamics/examples/comparisons/planar_push.jl. However, it still shows the error as ERROR: LoadError: type QuatRotation has no field x.
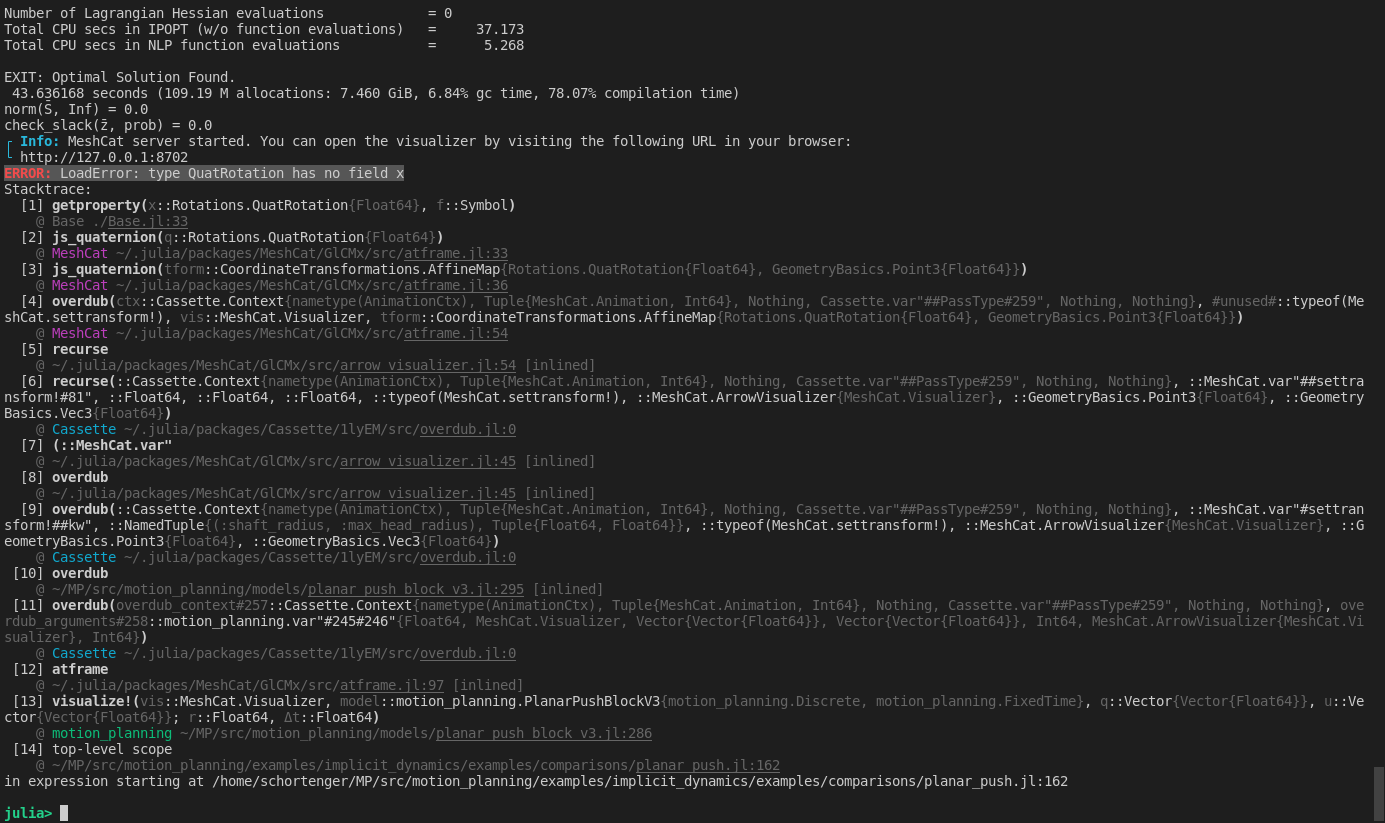
Looks like the actual trajectory optimization works and the subsequent issue is still with the rotations package. Will have time to fix the motion_planning in a few weeks. If you are specifically interested in this example I should have it spun out quite soon for paper revisions.