flexbe_behavior_engine
 flexbe_behavior_engine copied to clipboard
flexbe_behavior_engine copied to clipboard
Contains the behavior engine FlexBE.

Publish the current state path on the topic `flexbe/behavior_update` when entering a state.
The `SubscriberState` of the flexbe states was wrongly using `rostopic` to lookup relative topic names. It was always assuming topics to be at the root of the global namespace, even...
I am creating some states that are grouped with other packages in a repo, so I want to add the behaviors to the this same repo. The create_repo script assumes...
I would like to run a FlexBE behavior directly on a robot (so that it theoretically can run without operator), but want also to attach the FlexBE GUI to it...
I often (not always) get the error message ``` Behavior execution failed! ROS time moved backwards ``` when executing a behavior state machine on board. This is the exception traceback:...
Hi, I found that the /flexbe/behavior_update can be inaccurate, sometimes state update message can be missing or repeated and sometimes the order of the states update messages can be confusing,...
A Container, Statemachine and Concurrent, do not return the defined output_key/userdata to the calling parent. I've made a little test behavior to reproduce the error: 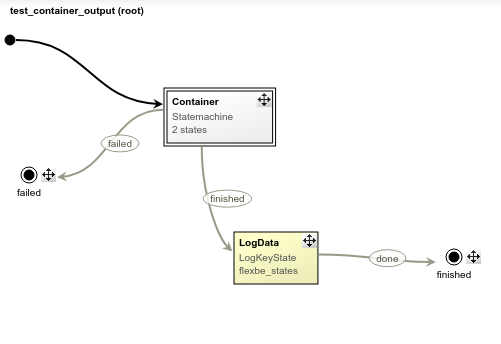 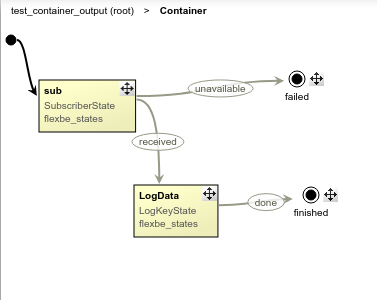 Error message is:...
This removes the possibility for an exception.
Hi, I noticed an issue with states imports when having same named states in different packages. For example if I have a state named SetParameter in the package named package1_states,...