rusty-graphs
 rusty-graphs copied to clipboard
rusty-graphs copied to clipboard
Collection of examples for showcasing various Rust graph data structure libraries.
Comparing Rust graph libraries, while introducing gryf
This is a collection of examples for showcasing various Rust graph data structure libraries. It is code heavy, with only little commentary. The main focus is put on the user experience. Performance is also considered, but without proper benchmarks. Aspects like completeness, correctness, documentation or usage and maintenance metrics are ignored whatsoever. Therefore, this document should not be considered as a guide to what dependency for your project to choose.
The list of libraries discussed here is the following1:
Disclaimer (bias): I am the author of gryf library, which is in the list.
I tried to be fair, but parts of the commentary are subjective.
Disclaimer (maintenance): I do not plan to keep this document up-to-date. But I will accept PRs doing that.
Disclaimer (fairness): There may be multiple ways how to achieve something in a library. If you think that an example can be improved, feel free to open a PR.
Disclaimer (benchmarks): All run times presented in this document are only
orientational. They were not collected in scientific manner. The examples were
compiled in --release mode.
1If you know of some other, feel free to tell me about it in an issue or pull request.
Exercises
- Recreate an example graph from Wikipedia article (see below). jump
- Find shortest paths from a vertex in a non-trivial graph (n = ~17.5k) of cities (data source), where neighboring cities are connected via (hypothetical) air transport. jump
- Get a topologically
sorted sequence of
vertices in a (
cargo tree) dependency graph to get a (hypothetical) valid compilation order. jump
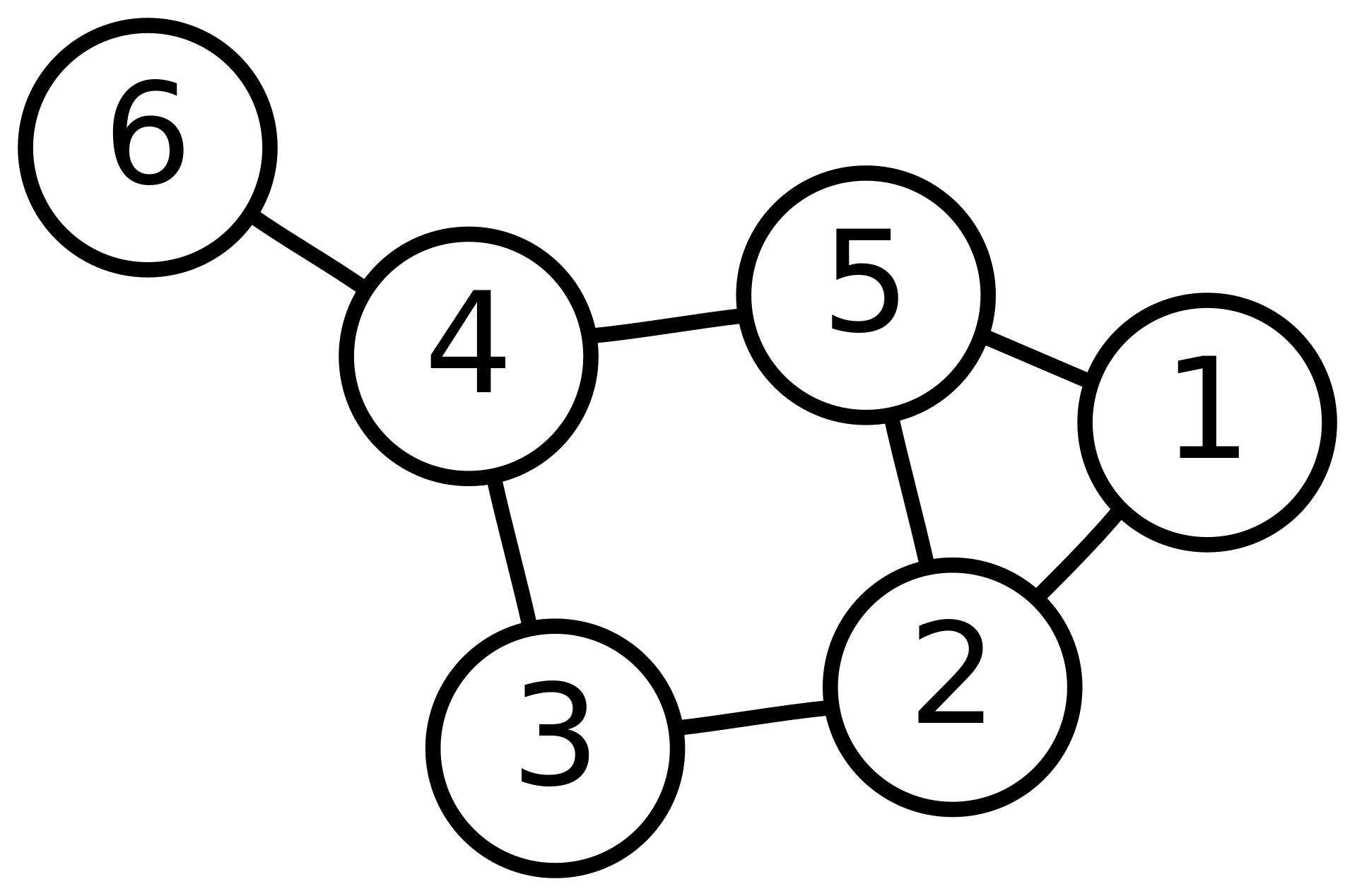
Vertices V = { 1 , 2 , 3 , 4 , 5 , 6 } and edges E = { { 1 , 2 } , { 1 , 5 } , { 2 , 3 } , { 2 , 5 } , { 3 , 4 } , { 4 , 5 } , { 4 , 6 } }.
I believe that the chosen exercises are to an extent realistic and not
cherry-picked. Note that graph crate has a different focus and does not
implement shortest paths and topological order algorithms at the time of the
writing.
Example graph
Table of contents
- petgraph
- prepona
- pathfinding
- graph
- graphlib
- graphific
- gryf
Example graph in petgraph
source
use petgraph::Graph;
let mut graph = Graph::new_undirected();
let v1 = graph.add_node(1);
let v2 = graph.add_node(2);
let v3 = graph.add_node(3);
let v4 = graph.add_node(4);
let v5 = graph.add_node(5);
let v6 = graph.add_node(6);
graph.add_edge(v1, v2, ());
graph.add_edge(v1, v5, ());
graph.add_edge(v2, v3, ());
graph.add_edge(v2, v5, ());
graph.add_edge(v3, v4, ());
graph.add_edge(v4, v5, ());
graph.add_edge(v4, v6, ());
As straightforward as one can get.
For adding edges, there is an alternative
graph.extend_with_edges([
(v1, v2, ()),
(v1, v5, ()),
(v2, v3, ()),
(v2, v5, ()),
(v3, v4, ()),
(v4, v5, ()),
(v4, v6, ()),
]);
or even
graph.extend_with_edges([
(v1, v2),
(v1, v5),
(v2, v3),
(v2, v5),
(v3, v4),
(v4, v5),
(v4, v6),
]);
(but the latter would require specifying the generic type of edge weight).
I don't have a strong opinion on which alternative is the best. It is also better to discuss API for adding edges on a more realistic example.
Graph::new_undirected() creates an undirected graph, while Graph::new()
would create a directed graph (there is not new_directed constructor).
Defaulting to a graph variant (directed/undirected) when using common new
constructor could lead to surprising behavior for a user not expecting this
default, as I don't think there is a consensus on whether directed is more
common than undirected or vice versa.
Example graph in prepona
source
use prepona::prelude::*;
use prepona::{graph::SimpleGraph, storage::List};
let mut graph = SimpleGraph::init(List::<()>::init());
let v1 = graph.add_vertex();
let v2 = graph.add_vertex();
let v3 = graph.add_vertex();
let v4 = graph.add_vertex();
let v5 = graph.add_vertex();
let v6 = graph.add_vertex();
graph.add_edge(v1, v2, ().into()).unwrap();
graph.add_edge(v1, v5, ().into()).unwrap();
graph.add_edge(v2, v3, ().into()).unwrap();
graph.add_edge(v2, v5, ().into()).unwrap();
graph.add_edge(v3, v4, ().into()).unwrap();
graph.add_edge(v4, v5, ().into()).unwrap();
graph.add_edge(v4, v6, ().into()).unwrap();
We see a separation of graph storage (List, aka adjacency
list) and graph semantics
(SimpleGraph, i.e. without parallel edges). What is unfortunate is that we are
required to make a choice, even if we don't care.
An interesting paper cut is the need for specifying the edge weight in this
example (List::<()>). Without it, we get this compile error:
error[E0282]: type annotations needed for `SimpleGraph<(), DefaultEdge<()>, Dir, AdjList<(), DefaultEdge<()>, Dir>>`
--> examples/prepona_hello.rs:5:9
|
5 | let mut graph = SimpleGraph::init(List::init());
| ^^^^^^^^^
|
help: consider giving `graph` an explicit type, where the type for type parameter `Dir` is specified
|
5 | let mut graph: SimpleGraph<(), DefaultEdge<()>, Dir, AdjList<(), DefaultEdge<()>, Dir>> = SimpleGraph::init(List::init());
| ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
For more information about this error, try `rustc --explain E0282`.
It is interesting that according to the error message Rust can't infer Dir
(directed vs undirected), not edge weight (first generic parameter of List).
It is counter-intuitive to see that a possible (and likely the simplest) fix is
to specify the edge weight.
The need for into in ().into() is due to the fact that the graph holds E: Edge<W> instead of W directly, where E is a type that implements
Edge trait.
This could be more ergonomic, as it looks like an unnecessary clutter, but not a
big deal.
Lastly, we can see that adding edge returns Result, hence the unwrap. This
is reasonable, as there are cases when this operation can fail (non-existent
vertex or already present edge for storages that do not support that). For
comparison, petgraph panics if a duplicate edge is added to adjacency matrix
graph. Ideally, there should be both a fallible and panicking method for such
operations which allows the user to choose according to their preference.
Example graph in pathfinding
source
struct Vertex {
label: usize,
connections: Vec<usize>,
}
impl Vertex {
fn new(label: usize, connections: Vec<usize>) -> Self {
Self { label, connections }
}
}
let graph = vec![
Vertex::new(1, vec![2, 5]),
Vertex::new(2, vec![1, 3, 5]),
Vertex::new(3, vec![2, 4]),
Vertex::new(4, vec![3, 5, 6]),
Vertex::new(5, vec![1, 2, 4]),
Vertex::new(6, vec![4]),
];
pathfinding crate has a very different API than the rest, which is a good fit
for graph-like data or implicit
graphs without the need of
storing it in a graph data structure. The graph representation is basically
completely on the user, and the algorithms only ask for getting neighbors of a
given vertex. Therefore, this example is not ideal to showcase the crate's
strengths.
Example graph in graph
source
use graph::prelude::*;
let graph: UndirectedCsrGraph<usize, i32> = GraphBuilder::new()
.edges(vec![(0, 1), (0, 4), (1, 2), (1, 4), (2, 3), (3, 4), (3, 5)])
.node_values(1..=6)
.build();
graph crate uses the builder pattern for creating a graph (in fact, they have
a dedicated crate
graph_builder for it).
The only required method is edges, which gets an iterable over pairs of vertex
indices defining the graph structure. The vertex index type (first generic,
required parameter) must implement Idx trait, which is implemented for all
standard integer types. As the example graph has labels from 1 to 6, I also use
node_values to specify the labels for the vertices (whose type is specified by
the second generic parameter).
The builder pattern does a good job on requiring only what is really necessary
-- the graph structure. Vertex and edge weights/labels, which are needed only on
per case basis, are optional and do not clutter the code where unnecessary. Put
it in contrast with petgraph, where we would need to use unit types in
graph.add_node(()) and graph.add_edge(u, v, ()).
Because the
signature
of the build method is generic over the return type, has several variants and
the type is where-constrained by From<...>, doing a slight mistake in typing
ends up in quite an overwhelming error message. For example in our case, if we
forgot to specify the node label type
let graph: UndirectedCsrGraph<usize> = ...
we would get
error[E0277]: the trait bound `graph::prelude::UndirectedCsrGraph<usize>: From<(graph_builder::graph::csr::NodeValues<{integer}>, EdgeList<{integer}, ()>, CsrLayout)>` is not satisfied
--> examples/graph_hello.rs:6:44
|
6 | let graph: UndirectedCsrGraph<usize> = GraphBuilder::new()
| ____________________________________________^
7 | | .edges(vec![(0, 1), (0, 4), (1, 2), (1, 4), (2, 3), (3, 4), (3, 5)])
8 | | .node_values(1..=6)
| |___________________________^ the trait `From<(graph_builder::graph::csr::NodeValues<{integer}>, EdgeList<{integer}, ()>, CsrLayout)>` is not implemented for `graph::prelude::UndirectedCsrGraph<usize>`
9 | .build();
| ----- required by a bound introduced by this call
|
= help: the following other types implement trait `From<T>`:
<graph::prelude::UndirectedCsrGraph<NI, (), EV> as From<(E, CsrLayout)>>
<graph::prelude::UndirectedCsrGraph<NI, (), EV> as From<graph_builder::graph::csr::Csr<NI, NI, EV>>>
<graph::prelude::UndirectedCsrGraph<NI, Label> as From<(DotGraph<NI, Label>, CsrLayout)>>
<graph::prelude::UndirectedCsrGraph<NI, NV, EV> as From<(graph_builder::graph::csr::NodeValues<NV>, E, CsrLayout)>>
<graph::prelude::UndirectedCsrGraph<NI> as From<(DotGraph<NI, Label>, CsrLayout)>>
<graph::prelude::UndirectedCsrGraph<NI> as From<(Graph500<NI>, CsrLayout)>>
note: required by a bound in `graph::prelude::GraphBuilder::<graph_builder::builder::FromEdgeListAndNodeValues<NI, NV, EV>>::build`
--> /local/path/to/graph_builder-0.3.0/src/builder.rs:480:16
|
480 | Graph: From<(NodeValues<NV>, EdgeList<NI, EV>, CsrLayout)>,
| ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^ required by this bound in `graph::prelude::GraphBuilder::<graph_builder::builder::FromEdgeListAndNodeValues<NI, NV, EV>>::build`
For more information about this error, try `rustc --explain E0277`.
Example graph in graphlib
source
use graphlib::Graph;
let mut graph = Graph::new();
let v1 = graph.add_vertex(1);
let v2 = graph.add_vertex(2);
let v3 = graph.add_vertex(3);
let v4 = graph.add_vertex(4);
let v5 = graph.add_vertex(5);
let v6 = graph.add_vertex(6);
graph.add_edge(&v1, &v2).unwrap();
graph.add_edge(&v1, &v5).unwrap();
graph.add_edge(&v2, &v3).unwrap();
graph.add_edge(&v2, &v5).unwrap();
graph.add_edge(&v3, &v4).unwrap();
graph.add_edge(&v4, &v5).unwrap();
graph.add_edge(&v4, &v6).unwrap();
This is very similar to what we have already seen. The only difference is that
passing vertex index to add_edge is done by reference. Under the hoods, the
vertex index is a 16-byte array, which is arguably unnecessarily large number
space, but probably chosen to decrease risk of conflict for
VertexId::random().
One major disadvantage of graphlib is that -- at the time of writing -- it
only supports directed graphs. The example code is therefore imprecise as the
the goal was an undirected graph.
Example graph in graphific
source
use graphific::{AnyGraph, BasicUndirectedGraph, Edge, Vertex};
let mut graph = BasicUndirectedGraph::<_, ()>::new();
graph = graph.add_vertex(Vertex::new(1)).unwrap();
graph = graph.add_vertex(Vertex::new(2)).unwrap();
graph = graph.add_vertex(Vertex::new(3)).unwrap();
graph = graph.add_vertex(Vertex::new(4)).unwrap();
graph = graph.add_vertex(Vertex::new(5)).unwrap();
graph = graph.add_vertex(Vertex::new(6)).unwrap();
graph = graph.add_edge(Edge::new(0, 1)).unwrap();
graph = graph.add_edge(Edge::new(0, 4)).unwrap();
graph = graph.add_edge(Edge::new(1, 2)).unwrap();
graph = graph.add_edge(Edge::new(1, 4)).unwrap();
graph = graph.add_edge(Edge::new(2, 3)).unwrap();
graph = graph.add_edge(Edge::new(3, 4)).unwrap();
graph = graph.add_edge(Edge::new(3, 5)).unwrap();
graphific takes a fundamentally different approach. Graph manipulation methods
take &self and return new instance of accordingly modified graph, without
mutating the original instance. It is essentially a persistent data
structure
implementation, although at the time of writing it simply clones the original
instance, which is a massive performance hit for larger graphs.
Another difference is explicit usage of a Vertex and Edge types that wrap
corresponding weights. I am not sure about the advantages.
Unfortunate is the need for importing AnyGraph trait, without which we can't
use neither add_vertex nor add_edge, which are essential for graph building.
Example graph in gryf
source
use gryf::prelude::*;
let mut graph = Graph::new_undirected();
let v1 = graph.add_vertex(1);
let v2 = graph.add_vertex(2);
let v3 = graph.add_vertex(3);
let v4 = graph.add_vertex(4);
let v5 = graph.add_vertex(5);
let v6 = graph.add_vertex(6);
graph.add_edge(v1, v2, ());
graph.add_edge(v1, v5, ());
graph.add_edge(v2, v3, ());
graph.add_edge(v2, v5, ());
graph.add_edge(v3, v4, ());
graph.add_edge(v4, v5, ());
graph.add_edge(v4, v6, ());
Almost identical to petgraph. For both add_vertex and add_edge there
exists a fallible try_* counterpart, which could be used if desired.
gryf has both new_undirected and new_directed constructors. There is also the new constructor, which does not specify the directionality of edges. And so if we used it in our example
let mut graph = Graph::new();
we would get
error[E0282]: type annotations needed for `gryf::Graph<i32, (), Ty>`
--> examples/gryf_hello.rs:4:9
|
4 | let mut graph = Graph::new();
| ^^^^^^^^^
|
help: consider giving `graph` an explicit type, where the type for type parameter `Ty` is specified
|
4 | let mut graph: gryf::Graph<i32, (), Ty> = Graph::new();
| ++++++++++++++++++++++++++
For more information about this error, try `rustc --explain E0282`.
Nevertheless, it could be fixed by specifying the Ty generic parameter (as
suggested by the error message) and only it:
use gryf::core::marker::Undirected;
let mut graph = Graph::<_, _, Undirected>::new();
Shortest paths
Support code:
#[derive(Debug, Clone, PartialEq)]
pub struct City {
pub id: u64,
pub name: String,
pub pop: u64,
pub lat: f32,
pub lon: f32,
}
impl City {
pub const MAX_DISTANCE: f32 = 300.0;
pub fn dist(&self, other: &Self) -> f32 {
// ...
}
pub fn are_connected(&self, other: &Self) -> Option<f32> {
let d = self.dist(other);
(d <= Self::MAX_DISTANCE && d > 0.0).then_some(d)
}
}
Data downloaded from here.
Table of contents
- petgraph
- prepona
- pathfinding
- graph
- graphlib
- graphific
- gryf
Shortest paths in petgraph
source
use petgraph::{
algo::dijkstra,
graph::{Graph, NodeIndex},
visit::{IntoNodeReferences, NodeRef},
};
let cities = load_cities();
let mut graph = Graph::new_undirected();
for city in cities.iter() {
graph.add_node(city);
}
println!("vertices = {}", graph.node_count());
for i in 0..graph.node_count() {
for j in (i + 1)..graph.node_count() {
let i = NodeIndex::from(i as u32);
let j = NodeIndex::from(j as u32);
let src = &graph[i];
let dst = &graph[j];
if let Some(edge) = src.are_connected(dst) {
graph.add_edge(i, j, edge);
}
}
}
println!("edges = {}", graph.edge_count());
let (start, target) = graph.node_references().fold(
(NodeIndex::default(), NodeIndex::default()),
|(start, target), v| {
if v.weight().name == START {
(v.id(), target)
} else if v.weight().name == TARGET {
(start, v.id())
} else {
(start, target)
}
},
);
let result = dijkstra(&graph, start, None, |e| *e.weight());
println!("distance = {}", result[&target]);
let result = dijkstra(&graph, start, Some(target), |e| *e.weight());
println!("distance = {}", result[&target]);
adding vertices took 146.112µs
vertices = 17695
connecting vertices took 7.201238525s
edges = 1232956
finding start and target took 157.563µs
dijkstra (without goal) took 45.668564ms
distance = 12782.68
dijkstra (with goal) took 31.75331ms
distance = 12782.68
For connecting the cities, we need to manually iterate over all pairs of
vertices and add edges where the cities are connected according to our
criterion. This is a pattern that we will see in most examples. We need to use a
for loop with usize indices and create NodeIndex manually from them. This
assumes that vertices are stored in contiguous order without gaps (which is
reasonable to expect).
For finding the start and target vertex indices we use Iterator::fold over
vertex references. This is again a pattern that we will see in most examples.
There might be a cleaner way, but for the purposes of this document it does not
matter the most.
Running the algorithm is done via calling dijkstra function. This approach
requires to specify all parameters, including the goal vertex and edge weight
function, even in cases when not needed (no goal) or where a reasonable default
exists (the edge itself). The advantage of edge weight function is that it gets
edge reference which also contains source and target indices. This allows to
calculate the weight based on the vertices without the need of storing the
weight during the graph creation.
The function returns HashMap<NodeId, W>. It is impossible to reconstruct the
path.
There is no way how to indicate an error (e.g, when an edge weight is negative). In fact, the implementation at the time of writing does not detect that and returns potentially invalid output.
Shortest paths in prepona
source
use prepona::prelude::*;
use prepona::{algo::Dijkstra, graph::SimpleGraph, storage::List};
let cities = load_cities();
// Using a custom wrapper over f32, because `ordered_float::OrderedFloat`
// does not implement `num_traits::Unsigned`.
let mut graph = SimpleGraph::init(List::<UF32>::init());
for _ in cities.iter() {
graph.add_vertex();
}
println!("vertices = {}", graph.vertex_count());
for i in 0..graph.vertex_count() {
let src = &cities[i];
#[allow(clippy::needless_range_loop)]
for j in (i + 1)..graph.vertex_count() {
let dst = &cities[j];
if let Some(edge) = src.are_connected(dst) {
graph
.add_edge(i, j, UF32::new(edge).unwrap().into())
.unwrap();
}
}
}
println!("edges = {}", graph.edges_count());
let (start, target) = graph
.vertices()
.into_iter()
.fold((0, 0), |(start, target), v| {
let city = &cities[v];
if city.name == START {
(v, target)
} else if city.name == TARGET {
(start, v)
} else {
(start, target)
}
});
let result = Dijkstra::init(&graph).execute(&graph, start);
println!(
"distance = {}",
result.distance_to(target).unwrap().unwrap().get()
);
println!("dijkstra (with goal) not available");
adding vertices took 253.299µs
vertices = 17695
connecting vertices took 7.401539732s
edges = 1232956
finding start and target took 359.142µs
dijkstra (without goal) took 528.269438ms
distance = 12782.68
dijkstra (with goal) not available
Fundamentally equivalent way how to construct the graph and get the start and
target vertices. Vertex in prepona can't hold any data, so we need to index
into the cities "database".
Running the algorithm consists of two steps: first the algorithm state is
initialized (init) and then the algorithm is executed (execute). The
advantages of this separation are not clear (to me). Moreover, it allows
misusing the API by passing different (or modified) instances of a graph into
each step, causing unspecified behavior. There is no way how to specify a goal
vertex or use a custom edge weight calculation.
The algorithm returns ShortestPathSubgraph. This type provides a distance_to
method. It could also provide a path reconstruction method, although it is not
present at the time of writing. A new type allows to change internals without it
being a breaking change.
Working with floats is not very convenient. The bounds on the generic type
requires the weight to implement both std::cmp::Ord and
num_traits::Unsigned, which rules out standard floats (f32, f64) as well
as common "ordered floats"
(ordered_float::OrderedFloat,
float_ord::FloatOrd).
Method distance_to returns Option<Magnitude<W>>. Magnitude<W> is an enum
with Finite(W), PosInfinite and NegInfinite, which seems unnecessary (as
that should be encoded in W itself or as None) and creates the necessity to
use double unwrap. The get call originates from using a custom type for
unsigned float.
Shortest paths in pathfinding
source
use std::collections::HashMap;
use ordered_float::OrderedFloat;
use pathfinding::directed::dijkstra::{dijkstra, dijkstra_all};
struct Vertex {
id: u64,
neighbors: Vec<(u64, OrderedFloat<f32>)>,
}
impl Vertex {
fn new(city: &City, cities: &[City]) -> Self {
let neighbors = cities
.iter()
.filter_map(|other| {
city.are_connected(other)
.map(|dist| (other.id, OrderedFloat(dist)))
})
.collect();
Self {
id: city.id,
neighbors,
}
}
}
let cities = load_cities();
let mut vertices = HashMap::with_capacity(cities.len());
for city in cities.iter() {
let v = Vertex::new(city, &cities);
vertices.insert(v.id, v);
}
println!("vertices = {}", vertices.len());
let (start, target) = cities.iter().fold((0, 0), |(start, target), city| {
if city.name == START {
(city.id, target)
} else if city.name == TARGET {
(start, city.id)
} else {
(start, target)
}
});
let result = dijkstra_all(&start, |n| vertices[n].neighbors.iter().copied());
println!("distance = {}", *result[&target].1);
let result = dijkstra(
&start,
|n| vertices[n].neighbors.iter().copied(),
|n| *n == target,
)
.unwrap();
println!("distance = {}", *result.1);
adding vertices + edges took 13.78980296s
vertices = 17695
finding start and target took 122.664µs
dijkstra (without goal) took 23.785947ms
distance = 12782.68
dijkstra (with goal) took 15.334814ms
distance = 12782.68
Again, due to a different approach to the API, we need to construct the graph of connections between the cities ourselves. Nevertheless, it is reasonably straightforward.
For running the algorithm, a function is called. There are two3
variants: without a goal (dijkstra_all) and with a goal (dijkstra). The
functions require the start vertex and a function returning an iterable over
neighbors of given vertex along with the edge weights. We need to use
ordered_float::OrderedFloat for the
edge weight as the algorithm requires it to be std::cmp::Ord. The way of
specifying the goal is more flexible than in petgraph as it is determined by a
closure with custom logic instead of passing a vertex index.
Functions dijkstra_all and dijkstra return HashMap<Vertex, (Vertex, W)>
and Option<(Vec<Vertex>, W)>, respectively. Reconstructing the path can be
done using build_path function, given that dijkstra_partial is used instead
of dijkstra.
3Technically there is a third variant dijkstra_partial, but it is not
important for our example.
Shortest paths in graph
source
use graph::prelude::*;
let cities = load_cities();
let mut edges = Vec::with_capacity(cities.len() * 5);
for i in 0..cities.len() {
let src = &cities[i];
#[allow(clippy::needless_range_loop)]
for j in (i + 1)..cities.len() {
let dst = &cities[j];
if let Some(edge) = src.are_connected(dst) {
edges.push((i, j, edge));
}
}
}
let graph: UndirectedCsrGraph<usize, &City, f32> = GraphBuilder::new()
.edges_with_values(edges)
.node_values(cities.iter())
.build();
println!("vertices = {}", graph.node_count());
println!("edges = {}", graph.edge_count());
let (start, target) = (0..graph.node_count()).fold((0, 0), |(start, target), v| {
let city = graph.node_value(v);
if city.name == START {
(v, target)
} else if city.name == TARGET {
(start, v)
} else {
(start, target)
}
});
println!("dijkstra (without goal) not available");
println!("dijkstra (with goal) not available");
adding vertices + edges took 6.941942926s
vertices = 17695
edges = 1232956
finding start and target took 9.656µs
dijkstra (without goal) not available
dijkstra (with goal) not available
graph crate has different focus: high-performant algorithms on large (sparse)
graphs. It does not provide an implementation of Dijkstra algorithm. For
single-source shortest paths, there is delta_stepping function, which requires
a directed graph and a delta parameter.
Shortest paths in graphlib
source
use graphlib::{iterators::Dijkstra, Graph, VertexId};
let cities = load_cities();
let mut graph = Graph::new();
let mut vertices = Vec::with_capacity(cities.len());
for city in cities.iter() {
let v = graph.add_vertex(city);
vertices.push(v);
}
println!("vertices = {}", graph.vertex_count());
for i in 0..graph.vertex_count() {
for j in (i + 1)..graph.vertex_count() {
let i = &vertices[i];
let j = &vertices[j];
let src = graph.fetch(i).unwrap();
let dst = graph.fetch(j).unwrap();
if let Some(edge) = src.are_connected(dst) {
// Weights are required to be in range [0, 1].
let edge_norm = edge / City::MAX_DISTANCE;
graph.add_edge_with_weight(i, j, edge_norm).unwrap();
// Graph is directed and that cannot be changed.
graph.add_edge_with_weight(j, i, edge_norm).unwrap();
}
}
}
println!("edges = {}", graph.edge_count());
let (start, target) = graph.vertices().fold(
(VertexId::random(), VertexId::random()),
|(start, target), v| {
let city = graph.fetch(v).unwrap();
if city.name == START {
(*v, target)
} else if city.name == TARGET {
(start, *v)
} else {
(start, target)
}
},
);
let mut result = Dijkstra::new(&graph, &start).unwrap();
println!(
"distance = {}",
result.get_distance(&target).unwrap() * City::MAX_DISTANCE
);
println!("dijkstra (with goal) not available");
adding vertices took 32.564949ms
vertices = 17695
connecting vertices took 51.361698183s
edges = 2465912
finding start and target took 911.451µs
dijkstra (without goal) took 1.571849687s
distance = 12782.681
dijkstra (with goal) not available
There are two inconveniences in graphlib for this example. First, it does not
provide an implementation of undirected graph, thus we need to add every edge
twice going forward and backward. Second, it requires the edge weights to be in
range [0, 1].
Running the algorithm is done via Dijkstra::new constructor. It does not allow
to specify a goal or custom edge weight. The return type is Result, so that
encountered errors can be handled in a graceful manner. There is possibility to
recompute the distances from a new start using set_source.
The type has get_distance_to and get_path_to (for path reconstruction).
However, the former takes &mut self and the latter takes self, which are
both somewhat unexpected and inconvenient choices.
Shortest paths in graphific
source
use graphific::{AnyGraph, BasicUndirectedGraph, Vertex};
let cities = load_cities();
let mut graph = BasicUndirectedGraph::new();
for (key, _) in cities.iter().enumerate() {
let v = Vertex::with_value(key, ());
graph = graph.add_vertex(v).unwrap();
}
println!("vertices = {}", graph.vertices().len());
for i in 0..cities.len() {
let src = &cities[i];
#[allow(clippy::needless_range_loop)]
for j in (i + 1)..cities.len() {
let dst = &cities[j];
if src.are_connected(dst).is_some() {
graph = graph.add_edge_between_keys(i, j).unwrap();
}
}
}
println!("edges = {}", graph.edges().len());
let (start, target) = graph
.vertices()
.into_iter()
.fold((0, 0), |(start, target), v| {
let city = &cities[*v.key()];
if city.name == START {
(*v.key(), target)
} else if city.name == TARGET {
(start, *v.key())
} else {
(start, target)
}
});
println!("dijkstra (without goal) not available");
println!("dijkstra (with goal) not available");
adding vertices took 64.639742ms
vertices = 17695
^C
Shortest paths in gryf
source
use gryf::algo::ShortestPaths;
use gryf::core::index::VertexIndex;
use gryf::prelude::*;
let cities = load_cities();
let mut graph = Graph::new_undirected();
for city in cities.iter() {
graph.add_vertex(city);
}
println!("vertices = {}", graph.vertex_count());
graph.connect_vertices(|src, dst| src.are_connected(dst));
println!("edges = {}", graph.edge_count());
let (start, target) = graph.vertices().fold(
(VertexIndex::null(), VertexIndex::null()),
|(start, target), v| {
if v.data().name == START {
(*v.index(), target)
} else if v.data().name == TARGET {
(start, *v.index())
} else {
(start, target)
}
},
);
let result = ShortestPaths::on(&graph).dijkstra().run(start).unwrap();
println!("distance = {}", result[target]);
let result = ShortestPaths::on(&graph)
.goal(target)
.dijkstra()
.run(start)
.unwrap();
println!("distance = {}", result[target]);
adding vertices took 404.781µs
vertices = 17695
connecting vertices took 7.245386004s
edges = 1232956
finding start and target took 220.374µs
dijkstra (without goal) took 48.9059ms
distance = 12782.68
dijkstra (with goal) took 33.414195ms
distance = 12782.68
In gryf, there is a small quality-of-life improvement in the form of
connect_vertices which allows to specify edges by a predicate that takes a
pair of vertices and returns the weight or nothing.
Running the algorithm is done via the builder pattern. It consists of
initializing the builder for given graph, setting what should be set, and
finally calling run with the start vertex (the only fundamentally required
parameter). It is possible to specify the goal vertex with goal builder method
or custom edge weight using edge_weight_fn builder method.
One important difference is that the builder is generically named
ShortestPaths, without any reference to a specific algorithm. (Note: calling
the dijkstra builder method is not technically necessary to get the result,
but it forces to use the Dijkstra algorithm to be comparable with other
libraries.) This allows the user not care about the underlying algorithm (unless
wanted or necessary) to get the solution of their problem.
The algorithm returns Result<ShortestPaths, ...>. Thus, encountered errors can
be handled in a graceful manner. The type provides dist method to get a
distance to a vertex, and reconstruct to get an iterator of vertices on the
shortest path. It also implements Index trait as a shortcut for dist (but
panicking on None).
Topological order
Support code:
#[derive(Debug, Clone)]
pub struct Package {
pub name: String,
pub deps: BTreeSet<String>,
}
impl Package {
pub fn has_dependency(&self, other: &Self) -> bool {
self.deps.contains(other.name.as_str())
}
}
Dependencies parsed from the output of cargo --no-dedupe --prefix depth.
Table of contents
- petgraph
- prepona
- pathfinding
- graph
- graphlib
- graphific
- gryf
Topological order in petgraph
source
use petgraph::{
algo::toposort,
graph::{Graph, NodeIndex},
};
let packages = load_tree();
let mut graph = Graph::new();
for package in packages.iter() {
graph.add_node(package);
}
println!("vertices = {}", graph.node_count());
for i in 0..graph.node_count() {
for j in 0..graph.node_count() {
let i = NodeIndex::from(i as u32);
let j = NodeIndex::from(j as u32);
let src = &graph[i];
let dst = &graph[j];
if dst.has_dependency(src) {
graph.add_edge(i, j, ());
}
}
}
println!("edges = {}", graph.edge_count());
let sorted = toposort(&graph, None)
.unwrap()
.into_iter()
.map(|v| graph[v].name.as_str())
.collect::<Vec<_>>();
println!("{sorted:?}");
adding vertices took 2.644µs
vertices = 106
connecting vertices took 361.425µs
edges = 200
topological sort took 10.763µs
Making the graph and running the algorithm is done the same way as in the
shortest path example. The toposort function also accepts optional mutable
reference to DfsSpace. As far as I understand it, its purpose is to reuse
allocated stack and discovered set, so that there is no need for buffer
reallocation if used on the same or only slightly changed graph. Using
language:rust path:*.rs /toposort\(.+,\s*Some\(/ query on GitHub gave me 4
relevant code instances of using some space, from which just one was using it in
the intended way. It is a good idea to be able to exploit some knowledge from
the past to avoid unnecessary performance hits, but it seems that it isn't used
widely but still adds clutter to the API.
The function returns Vec<NodeId> if successful and Cycle<NodeId> if a cycle
is detected. It is nice to have an information about where the cycle is,
although it may be more useful to get an edge that participates in the cycle
rather than just the vertex.
Topological order in prepona
source
use prepona::prelude::*;
use prepona::{algo::TopologicalSort, graph::SimpleGraph, storage::DiList};
let packages = load_tree();
let mut graph = SimpleGraph::init(DiList::<()>::init());
for _ in packages.iter() {
graph.add_vertex();
}
println!("vertices = {}", graph.vertex_count());
for i in 0..graph.vertex_count() {
let src = &packages[i];
#[allow(clippy::needless_range_loop)]
for j in 0..graph.vertex_count() {
let dst = &packages[j];
if dst.has_dependency(src) {
graph.add_edge(i, j, ().into()).unwrap();
}
}
}
println!("edges = {}", graph.edges_count());
let sorted = TopologicalSort::init()
.execute(&graph)
.into_iter()
.map(|v| packages[v].name.as_str())
.collect::<Vec<_>>();
println!("{sorted:?}");
adding vertices took 3.286µs
vertices = 106
connecting vertices took 260.131µs
edges = 200
topological sort took 52.559µs
The code is again very similar to the example for shortest path. The only interesting fact is that the algorithm does not return an error in case of cycle. In fact, the implementation at the time of writing does not detect cycles.
Topological order in pathfinding
source
use std::collections::HashMap;
use pathfinding::directed::topological_sort::topological_sort;
let packages = rusty_graphs::load_tree();
let mut inverse_deps = HashMap::with_capacity(packages.len());
let mut roots = Vec::new();
for package in packages.iter() {
let deps = packages
.iter()
.filter(|other| other.has_dependency(package))
.map(|other| other.name.as_str())
.collect::<Vec<_>>();
if package.deps.is_empty() {
roots.push(package.name.as_str());
}
inverse_deps.insert(package.name.as_str(), deps);
}
println!("vertices = {}", inverse_deps.len());
let sorted = topological_sort(&roots, |name| inverse_deps[name].iter().copied()).unwrap();
println!("{sorted:?}");
adding vertices + edges took 177.503µs
vertices = 106
topological sort took 88.716µs
For pathfinding we see again custom handling of graph storage. The API is
consistent with the shortest path example. Similar to petgraph, the return
type is Vec<Vertex> if successful and Vertex if a cycle is detected.
Topological order in graph
source
use graph::prelude::*;
let packages = load_tree();
let mut edges = Vec::with_capacity(packages.len() * 5);
for i in 0..packages.len() {
let src = &packages[i];
#[allow(clippy::needless_range_loop)]
for j in 0..packages.len() {
let dst = &packages[j];
if dst.has_dependency(src) {
edges.push((i, j));
}
}
}
let graph: DirectedCsrGraph<usize, &Package> = GraphBuilder::new()
.edges(edges)
.node_values(packages.iter())
.build();
println!("vertices = {}", graph.node_count());
println!("edges = {}", graph.edge_count());
println!("topological sort not available");
adding vertices + edges took 941.31µs
vertices = 106
edges = 200
topological sort not available
Again, for different focus of the crate, the implementation of topological order is not available.
Topological order in graphlib
source
use graphlib::Graph;
let packages = load_tree();
let mut vertices = Vec::with_capacity(packages.len());
let mut graph = Graph::new();
for package in packages.iter() {
let v = graph.add_vertex(package);
vertices.push(v);
}
println!("vertices = {}", graph.vertex_count());
for i in 0..graph.vertex_count() {
for j in 0..graph.vertex_count() {
let i = &vertices[i];
let j = &vertices[j];
let src = graph.fetch(i).unwrap();
let dst = graph.fetch(j).unwrap();
if dst.has_dependency(src) {
graph.add_edge(i, j).unwrap();
}
}
}
println!("edges = {}", graph.edge_count());
let sorted = graph
.topo()
.map(|v| graph.fetch(v).unwrap().name.as_str())
.collect::<Vec<_>>();
println!("{sorted:?}");
adding vertices took 187.755µs
vertices = 106
connecting vertices took 550.037µs
edges = 200
topological sort took 19.083µs
In graphlib, the topo method returns a custom type Topo which implements
an iterator over vertex indices in topological order. Being lazy, it allows to
take only subset of vertices if desired in the application without the need of
finding a topological order between the rest of the vertices. This is a nice
feature.
Unfortunately, the algorithm panics if it encounters a cycle. Or you could use
Topo::is_cyclic(&mut self) -> bool, which exhausts the underlying iterator,
and then call topo again.
Topological order in graphific
source
use graphific::{AnyGraph, BasicDirectedGraph, Vertex};
let packages = load_tree();
let mut graph = BasicDirectedGraph::new();
for (key, _) in packages.iter().enumerate() {
let v = Vertex::with_value(key, ());
graph = graph.add_vertex(v).unwrap();
}
println!("vertices = {}", graph.vertices().len());
for i in 0..packages.len() {
let src = &packages[i];
#[allow(clippy::needless_range_loop)]
for j in 0..packages.len() {
let dst = &packages[j];
if dst.has_dependency(src) {
graph = graph.add_edge_between_keys(i, j).unwrap();
}
}
}
println!("edges = {}", graph.edges().len());
println!("topological sort not available");
adding vertices took 13.191µs
vertices = 106
connecting vertices took 317.225µs
edges = 200
topological sort not available
Topological order is not available in graphific.
Topological order in gryf
source
use gryf::algo::TopoSort;
use gryf::prelude::*;
let packages = load_tree();
let mut graph = Graph::new_directed();
for package in packages.iter() {
graph.add_vertex(package);
}
println!("vertices = {}", graph.vertex_count());
graph.connect_vertices(|u, v| v.has_dependency(u).then_some(()));
println!("edges = {}", graph.edge_count());
let sorted = TopoSort::on(&graph)
.run()
.map(|r| r.map(|v| graph[v].name.as_str()))
.collect::<Result<Vec<_>, _>>()
.unwrap();
println!("{sorted:?}");
adding vertices took 2.044µs
vertices = 106
connecting vertices took 290.569µs
edges = 200
topological sort took 37.061µs
In gryf a custom type is returned which implements iterator over
Result<VertexId, Error>. This allows lazy behavior but still makes it possible
to react on a cycle. Thanks to the design of
FromIterator
std trait, it is also possible to collect such iterator into
Result<Vec<VertexId>, Error>, which effectively becomes the same API as in
petgraph for example. If one wants to stick with the lazy iterator semantics,
the Result item type makes the usage a little bit awkward. If the graph is
guaranteed to be acyclic, the experience can be improved by adding
.map(Result::unwrap) just after run(). The cycle error contains an edge that
is part of the cycle. There is also a helper routine to collect all edges of
that cycle.
Conclusion
It's awesome to see that each crate has unique idea(s) and that one can take inspiration from, and so I did. Obviously, some libraries are developed more than others (which may be even abandoned). Different libraries have different design goals too.
I am satisfied with how gryf "scores" in this comparison. There are definitely
parts to refine and features to add, but I believe that the base is strong. Any
feedback is very appreciated. And if you like what you see, contribution (be it
code or just an idea) is welcome too of course.