Ros noetic TF_REPEATED_DATA
Bug report
- AirSim Version/#commit: latest master
- UE/Unity version: N/A
- autopilot version: N/A
- OS Version: 18.04
What's the issue you encountered?
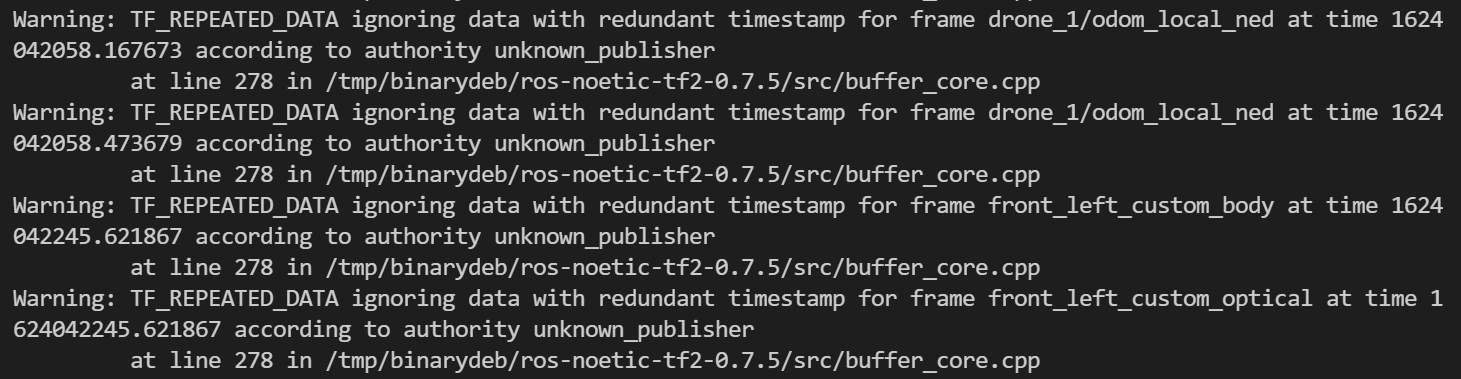
When trying to run the airsim ros wrapper in noetic (I need to run it in noetic in order to get to ro1_bridge to works, only on focal) the wrapper starts and works correctly but my logs are full of :
Warning: TF_REPEATED_DATA ignoring data with redundant timestamp for frame UrdfBot/odom_local_ned at time 93848.739428 according to authority unknown_publisher
Related to: https://github.com/ros/geometry2/issues/467
Settings
N/A
How can the issue be reproduced?
Run the node in Ros noetic ubuntu 20.04
Include full error message in text form
ue4-ros | AirsimROSWrapper Initialized! ue4-ros | Warning: TF_REPEATED_DATA ignoring data with redundant timestamp for frame UrdfBot/odom_local_ned at time 93848.739428 according to authority unknown_publisher ue4-ros | at line 278 in /tmp/binarydeb/ros-noetic-tf2-0.7.5/src/buffer_core.cpp ue4-ros | Warning: TF_REPEATED_DATA ignoring data with redundant timestamp for frame UrdfBot/odom_local_ned at time 93848.739428 according to authority unknown_publisher ue4-ros | at line 278 in /tmp/binarydeb/ros-noetic-tf2-0.7.5/src/buffer_core.cpp ue4-ros | Warning: TF_REPEATED_DATA ignoring data with redundant timestamp for frame UrdfBot/odom_local_ned at time 93848.739428 according to authority unknown_publisher ue4-ros | at line 278 in /tmp/binarydeb/ros-noetic-tf2-0.7.5/src/buffer_core.cpp
I have the same problem. I use ROS Noetic in order to get Python3 support (Kinetic and Melodic only support Python2 officially) which is needed for PyTorch modules I use in one of the nodes. Any help from the maintainers would be appreciated.
This is getting worse, it's preventing ros services from being executed, even simple services like airsim_node/drone_1/takeoff will return success: False, and services like /airsim_node/gps_goal or /airsim_node/local_position_goal will not be executed because their messages are being ignored by /airsim_node although the messages have been published to topic /vel_cmd_world_frame
 This is the output of
This is the output of rostopic echo /vel_cmd_world_frame
 Moreover, the
Moreover, the /pid_position_node will loop forever printing out [PIDPositionController] Moving to goal. but not moving the drone