Yaw keeps decreasing
Hi Kris,
I use your program in this repository (MPU9250_BMP280_BasicAHRS_nRF52.ino). I output the quaternion after the sensor fusion. After putting it on flat surface for calibration of gyro and accelerometer, and making 8 figure for magnetometer calibration, I tried to test it by doing yaw rotation by 90 degrees, I noticed that the q[1] is the z rotation representation, however I received some measurements in q[2] as I did 90 degree yaw rotation. Another Issue is that the values keep decreasing after I made 90 degrees of rotation, approaching the initial values. I did not change any of the calibration code, could it be because of the calibration issue ? Attached is the output, thank you. -- | -- | -- | -- | -- q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.98 | 0.2 | 0.01 q: | -0.03 | -0.98 | 0.22 | 0.01 q: | -0.01 | -0.97 | 0.24 | 0.01 q: | -0.01 | -0.97 | 0.25 | 0.01 q: | -0.01 | -0.96 | 0.26 | 0.01 q: | 0 | -0.96 | 0.28 | 0.01 q: | 0 | -0.96 | 0.3 | 0.01 q: | 0 | -0.95 | 0.31 | 0.01 q: | 0.01 | -0.94 | 0.33 | 0.01 q: | 0.01 | -0.94 | 0.35 | 0.01 q: | 0.01 | -0.93 | 0.36 | 0.01 q: | 0.02 | -0.92 | 0.38 | 0.01 q: | 0.02 | -0.92 | 0.4 | 0.02 q: | 0.02 | -0.91 | 0.42 | 0.01 q: | 0.02 | -0.9 | 0.44 | 0.02 q: | 0.03 | -0.89 | 0.46 | 0.02 q: | 0.03 | -0.88 | 0.48 | 0.02 q: | 0.04 | -0.86 | 0.5 | 0.02 q: | 0.04 | -0.85 | 0.52 | 0.02 q: | 0.02 | -0.85 | 0.53 | 0.04 q: | 0.04 | -0.84 | 0.54 | 0.03 q: | 0.04 | -0.83 | 0.55 | 0.03 q: | 0.04 | -0.82 | 0.57 | 0.04 q: | 0.04 | -0.82 | 0.57 | 0.04 q: | 0.04 | -0.82 | 0.58 | 0.04 q: | 0.05 | -0.81 | 0.58 | 0.03 q: | 0.05 | -0.8 | 0.59 | 0.03 q: | 0.05 | -0.79 | 0.6 | 0.04 q: | 0.05 | -0.79 | 0.61 | 0.04 q: | 0.05 | -0.78 | 0.62 | 0.04 q: | 0.05 | -0.78 | 0.63 | 0.04 q: | 0.06 | -0.77 | 0.63 | 0.04 q: | 0.06 | -0.76 | 0.64 | 0.04 q: | 0.06 | -0.76 | 0.65 | 0.04 q: | 0.06 | -0.75 | 0.66 | 0.04 q: | 0.06 | -0.75 | 0.66 | 0.04 q: | 0.06 | -0.74 | 0.66 | 0.04 q: | 0.06 | -0.74 | 0.67 | 0.04 q: | 0.06 | -0.74 | 0.67 | 0.04 q: | 0.06 | -0.73 | 0.67 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.72 | 0.69 | 0.04 q: | 0.06 | -0.72 | 0.69 | 0.04 q: | 0.06 | -0.72 | 0.69 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.03 q: | 0.06 | -0.73 | 0.68 | 0.03 q: | 0.07 | -0.73 | 0.68 | 0.03 q: | 0.07 | -0.74 | 0.67 | 0.03 q: | 0.07 | -0.74 | 0.67 | 0.03 q: | 0.07 | -0.74 | 0.67 | 0.03 q: | 0.06 | -0.74 | 0.67 | 0.03 q: | 0.06 | -0.74 | 0.67 | 0.03 q: | 0.06 | -0.75 | 0.66 | 0.03 q: | 0.07 | -0.75 | 0.66 | 0.03 q: | 0.06 | -0.75 | 0.66 | 0.03 q: | 0.06 | -0.75 | 0.66 | 0.03 q: | 0.06 | -0.75 | 0.65 | 0.03 q: | 0.06 | -0.76 | 0.65 | 0.03 q: | 0.06 | -0.76 | 0.65 | 0.03 q: | 0.06 | -0.76 | 0.65 | 0.03 q: | 0.06 | -0.76 | 0.64 | 0.03 q: | 0.06 | -0.76 | 0.64 | 0.03 q: | 0.06 | -0.77 | 0.64 | 0.03 q: | 0.06 | -0.77 | 0.64 | 0.03 q: | 0.06 | -0.77 | 0.63 | 0.03 q: | 0.06 | -0.77 | 0.63 | 0.03 q: | 0.06 | -0.77 | 0.63 | 0.03 q: | 0.06 | -0.78 | 0.63 | 0.03 q: | 0.06 | -0.78 | 0.62 | 0.03 q: | 0.06 | -0.78 | 0.62 | 0.03 q: | 0.06 | -0.78 | 0.62 | 0.03 q: | 0.06 | -0.78 | 0.62 | 0.03 q: | 0.06 | -0.79 | 0.62 | 0.03 q: | 0.06 | -0.79 | 0.61 | 0.03 q: | 0.06 | -0.79 | 0.61 | 0.03 q: | 0.06 | -0.79 | 0.61 | 0.03 q: | 0.06 | -0.79 | 0.61 | 0.03 q: | 0.06 | -0.79 | 0.6 | 0.03 q: | 0.06 | -0.8 | 0.6 | 0.03 q: | 0.06 | -0.8 | 0.6 | 0.03 q: | 0.06 | -0.8 | 0.6 | 0.03 q: | 0.06 | -0.8 | 0.59 | 0.03 q: | 0.06 | -0.8 | 0.59 | 0.02 q: | 0.06 | -0.81 | 0.59 | 0.02 q: | 0.06 | -0.81 | 0.59 | 0.02 q: | 0.06 | -0.81 | 0.58 | 0.02 q: | 0.06 | -0.81 | 0.58 | 0.02 q: | 0.06 | -0.81 | 0.58 | 0.02 q: | 0.06 | -0.81 | 0.58 | 0.02 q: | 0.06 | -0.82 | 0.57 | 0.02 q: | 0.06 | -0.82 | 0.57 | 0.02 q: | 0.06 | -0.82 | 0.57 | 0.02 q: | 0.06 | -0.82 | 0.57 | 0.02 q: | 0.06 | -0.82 | 0.56 | 0.02 q: | 0.06 | -0.82 | 0.56 | 0.02 q: | 0.06 | -0.83 | 0.56 | 0.02 q: | 0.06 | -0.83 | 0.56 | 0.02 q: | 0.05 | -0.83 | 0.55 | 0.02 q: | 0.05 | -0.83 | 0.55 | 0.02 q: | 0.05 | -0.83 | 0.55 | 0.02 q: | 0.05 | -0.83 | 0.55 | 0.02 q: | 0.05 | -0.84 | 0.55 | 0.02 q: | 0.05 | -0.84 | 0.54 | 0.02 q: | 0.05 | -0.84 | 0.54 | 0.02 q: | 0.05 | -0.84 | 0.54 | 0.02 q: | 0.05 | -0.84 | 0.54 | 0.02 q: | 0.05 | -0.84 | 0.53 | 0.02 q: | 0.05 | -0.85 | 0.53 | 0.02 q: | 0.05 | -0.85 | 0.53 | 0.02 q: | 0.05 | -0.85 | 0.53 | 0.02 q: | 0.05 | -0.85 | 0.52 | 0.02 q: | 0.05 | -0.85 | 0.52 | 0.02 q: | 0.05 | -0.85 | 0.52 | 0.02 q: | 0.05 | -0.86 | 0.52 | 0.02 q: | 0.05 | -0.86 | 0.51 | 0.02 q: | 0.05 | -0.86 | 0.51 | 0.02 q: | 0.05 | -0.86 | 0.51 | 0.02 q: | 0.05 | -0.86 | 0.51 | 0.02 q: | 0.05 | -0.86 | 0.5 | 0.02 q: | 0.05 | -0.86 | 0.5 | 0.02 q: | 0.05 | -0.87 | 0.5 | 0.02 q: | 0.05 | -0.87 | 0.5 | 0.02 q: | 0.05 | -0.87 | 0.49 | 0.02 q: | 0.05 | -0.87 | 0.49 | 0.02 q: | 0.05 | -0.87 | 0.49 | 0.02 q: | 0.05 | -0.87 | 0.49 | 0.02 q: | 0.05 | -0.87 | 0.48 | 0.02 q: | 0.05 | -0.87 | 0.48 | 0.02 q: | 0.05 | -0.88 | 0.48 | 0.02 q: | 0.05 | -0.88 | 0.48 | 0.02 q: | 0.05 | -0.88 | 0.47 | 0.02 q: | 0.05 | -0.88 | 0.47 | 0.02 q: | 0.05 | -0.88 | 0.47 | 0.02 q: | 0.05 | -0.88 | 0.47 | 0.02 q: | 0.04 | -0.88 | 0.47 | 0.02 q: | 0.04 | -0.88 | 0.46 | 0.02 q: | 0.04 | -0.89 | 0.46 | 0.02 q: | 0.04 | -0.89 | 0.46 | 0.02 q: | 0.04 | -0.89 | 0.46 | 0.02 q: | 0.04 | -0.89 | 0.45 | 0.02 q: | 0.04 | -0.89 | 0.45 | 0.02 q: | 0.04 | -0.89 | 0.45 | 0.02 q: | 0.04 | -0.89 | 0.45 | 0.02 q: | 0.04 | -0.89 | 0.45 | 0.02 q: | 0.04 | -0.89 | 0.44 | 0.02 q: | 0.04 | -0.9 | 0.44 | 0.02 q: | 0.04 | -0.9 | 0.44 | 0.02 q: | 0.04 | -0.9 | 0.44 | 0.02 q: | 0.04 | -0.9 | 0.44 | 0.02 q: | 0.04 | -0.9 | 0.43 | 0.02 q: | 0.04 | -0.9 | 0.43 | 0.02 q: | 0.04 | -0.9 | 0.43 | 0.02 q: | 0.04 | -0.9 | 0.43 | 0.02 q: | 0.04 | -0.9 | 0.42 | 0.02 q: | 0.04 | -0.91 | 0.42 | 0.02 q: | 0.04 | -0.91 | 0.42 | 0.01 q: | 0.04 | -0.91 | 0.42 | 0.01 q: | 0.04 | -0.91 | 0.42 | 0.01 q: | 0.04 | -0.91 | 0.41 | 0.01 q: | 0.04 | -0.91 | 0.41 | 0.01 q: | 0.04 | -0.91 | 0.41 | 0.01 q: | 0.04 | -0.91 | 0.41 | 0.01 q: | 0.04 | -0.91 | 0.41 | 0.01 q: | 0.04 | -0.91 | 0.4 | 0.01 q: | 0.04 | -0.91 | 0.4 | 0.01 q: | 0.04 | -0.92 | 0.4 | 0.01 q: | 0.04 | -0.92 | 0.4 | 0.01 q: | 0.03 | -0.92 | 0.4 | 0.01 q: | 0.03 | -0.92 | 0.4 | 0.01 q: | 0.03 | -0.92 | 0.39 | 0.01 q: | 0.03 | -0.92 | 0.39 | 0.01 q: | 0.03 | -0.92 | 0.39 | 0.01 q: | 0.03 | -0.92 | 0.39 | 0.01 q: | 0.03 | -0.92 | 0.39 | 0.01 q: | 0.03 | -0.92 | 0.38 | 0.01 q: | 0.03 | -0.92 | 0.38 | 0.01 q: | 0.03 | -0.92 | 0.38 | 0.01 q: | 0.03 | -0.93 | 0.38 | 0.01 q: | 0.03 | -0.93 | 0.38 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.95 | 0.32 | 0.01 q: | 0.03 | -0.95 | 0.32 | 0.01 q: | 0.03 | -0.95 | 0.32 | 0.01 q: | 0.02 | -0.95 | 0.32 | 0.01 q: | 0.02 | -0.95 | 0.32 | 0.01 q: | 0.02 | -0.95 | 0.32 | 0.01 q: | 0.02 | -0.95 | 0.32 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.3 | 0.01 q: | 0.02 | -0.95 | 0.3 | 0.01 q: | 0.02 | -0.95 | 0.3 | 0.01 | | | |
I would use the quaternions to get Euler angles, then you can check calibration, which I suspect is off.
On Tue, Aug 14, 2018 at 1:52 AM radleypr [email protected] wrote:
Hi Kris,
I use your program in this repository (MPU9250_BMP280_BasicAHRS_nRF52.ino). I output the quaternion after the sensor fusion. After putting it on flat surface for calibration of gyro and accelerometer, and making 8 figure for magnetometer calibration, I tried to test it by doing yaw rotation by 90 degrees, I noticed that the q[1] is the z rotation representation, however I received some measurements in q[2] as I did 90 degree yaw rotation. Another Issue is that the values keep decreasing after I made 90 degrees of rotation, approaching the initial values. I did not change any of the calibration code, could it be because of the calibration issue ? Attached is the output, thank you. -- | -- | -- | -- | -- q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | -0.01 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.99 | 0.12 | 0 q: | 0 | -0.98 | 0.2 | 0.01 q: | -0.03 | -0.98 | 0.22 | 0.01 q: | -0.01 | -0.97 | 0.24 | 0.01 q: | -0.01 | -0.97 | 0.25 | 0.01 q: | -0.01 | -0.96 | 0.26 | 0.01 q: | 0 | -0.96 | 0.28 | 0.01 q: | 0 | -0.96 | 0.3 | 0.01 q: | 0 | -0.95 | 0.31 | 0.01 q: | 0.01 | -0.94 | 0.33 | 0.01 q: | 0.01 | -0.94 | 0.35 | 0.01 q: | 0.01 | -0.93 | 0.36 | 0.01 q: | 0.02 | -0.92 | 0.38 | 0.01 q: | 0.02 | -0.92 | 0.4 | 0.02 q: | 0.02 | -0.91 | 0.42 | 0.01 q: | 0.02 | -0.9 | 0.44 | 0.02 q: | 0.03 | -0.89 | 0.46 | 0.02 q: | 0.03 | -0.88 | 0.48 | 0.02 q: | 0.04 | -0.86 | 0.5 | 0.02 q: | 0.04 | -0.85 | 0.52 | 0.02 q: | 0.02 | -0.85 | 0.53 | 0.04 q: | 0.04 | -0.84 | 0.54 | 0.03 q: | 0.04 | -0.83 | 0.55 | 0.03 q: | 0.04 | -0.82 | 0.57 | 0.04 q: | 0.04 | -0.82 | 0.57 | 0.04 q: | 0.04 | -0.82 | 0.58 | 0.04 q: | 0.05 | -0.81 | 0.58 | 0.03 q: | 0.05 | -0.8 | 0.59 | 0.03 q: | 0.05 | -0.79 | 0.6 | 0.04 q: | 0.05 | -0.79 | 0.61 | 0.04 q: | 0.05 | -0.78 | 0.62 | 0.04 q: | 0.05 | -0.78 | 0.63 | 0.04 q: | 0.06 | -0.77 | 0.63 | 0.04 q: | 0.06 | -0.76 | 0.64 | 0.04 q: | 0.06 | -0.76 | 0.65 | 0.04 q: | 0.06 | -0.75 | 0.66 | 0.04 q: | 0.06 | -0.75 | 0.66 | 0.04 q: | 0.06 | -0.74 | 0.66 | 0.04 q: | 0.06 | -0.74 | 0.67 | 0.04 q: | 0.06 | -0.74 | 0.67 | 0.04 q: | 0.06 | -0.73 | 0.67 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.72 | 0.69 | 0.04 q: | 0.06 | -0.72 | 0.69 | 0.04 q: | 0.06 | -0.72 | 0.69 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.04 q: | 0.06 | -0.73 | 0.68 | 0.03 q: | 0.06 | -0.73 | 0.68 | 0.03 q: | 0.07 | -0.73 | 0.68 | 0.03 q: | 0.07 | -0.74 | 0.67 | 0.03 q: | 0.07 | -0.74 | 0.67 | 0.03 q: | 0.07 | -0.74 | 0.67 | 0.03 q: | 0.06 | -0.74 | 0.67 | 0.03 q: | 0.06 | -0.74 | 0.67 | 0.03 q: | 0.06 | -0.75 | 0.66 | 0.03 q: | 0.07 | -0.75 | 0.66 | 0.03 q: | 0.06 | -0.75 | 0.66 | 0.03 q: | 0.06 | -0.75 | 0.66 | 0.03 q: | 0.06 | -0.75 | 0.65 | 0.03 q: | 0.06 | -0.76 | 0.65 | 0.03 q: | 0.06 | -0.76 | 0.65 | 0.03 q: | 0.06 | -0.76 | 0.65 | 0.03 q: | 0.06 | -0.76 | 0.64 | 0.03 q: | 0.06 | -0.76 | 0.64 | 0.03 q: | 0.06 | -0.77 | 0.64 | 0.03 q: | 0.06 | -0.77 | 0.64 | 0.03 q: | 0.06 | -0.77 | 0.63 | 0.03 q: | 0.06 | -0.77 | 0.63 | 0.03 q: | 0.06 | -0.77 | 0.63 | 0.03 q: | 0.06 | -0.78 | 0.63 | 0.03 q: | 0.06 | -0.78 | 0.62 | 0.03 q: | 0.06 | -0.78 | 0.62 | 0.03 q: | 0.06 | -0.78 | 0.62 | 0.03 q: | 0.06 | -0.78 | 0.62 | 0.03 q: | 0.06 | -0.79 | 0.62 | 0.03 q: | 0.06 | -0.79 | 0.61 | 0.03 q: | 0.06 | -0.79 | 0.61 | 0.03 q: | 0.06 | -0.79 | 0.61 | 0.03 q: | 0.06 | -0.79 | 0.61 | 0.03 q: | 0.06 | -0.79 | 0.6 | 0.03 q: | 0.06 | -0.8 | 0.6 | 0.03 q: | 0.06 | -0.8 | 0.6 | 0.03 q: | 0.06 | -0.8 | 0.6 | 0.03 q: | 0.06 | -0.8 | 0.59 | 0.03 q: | 0.06 | -0.8 | 0.59 | 0.02 q: | 0.06 | -0.81 | 0.59 | 0.02 q: | 0.06 | -0.81 | 0.59 | 0.02 q: | 0.06 | -0.81 | 0.58 | 0.02 q: | 0.06 | -0.81 | 0.58 | 0.02 q: | 0.06 | -0.81 | 0.58 | 0.02 q: | 0.06 | -0.81 | 0.58 | 0.02 q: | 0.06 | -0.82 | 0.57 | 0.02 q: | 0.06 | -0.82 | 0.57 | 0.02 q: | 0.06 | -0.82 | 0.57 | 0.02 q: | 0.06 | -0.82 | 0.57 | 0.02 q: | 0.06 | -0.82 | 0.56 | 0.02 q: | 0.06 | -0.82 | 0.56 | 0.02 q: | 0.06 | -0.83 | 0.56 | 0.02 q: | 0.06 | -0.83 | 0.56 | 0.02 q: | 0.05 | -0.83 | 0.55 | 0.02 q: | 0.05 | -0.83 | 0.55 | 0.02 q: | 0.05 | -0.83 | 0.55 | 0.02 q: | 0.05 | -0.83 | 0.55 | 0.02 q: | 0.05 | -0.84 | 0.55 | 0.02 q: | 0.05 | -0.84 | 0.54 | 0.02 q: | 0.05 | -0.84 | 0.54 | 0.02 q: | 0.05 | -0.84 | 0.54 | 0.02 q: | 0.05 | -0.84 | 0.54 | 0.02 q: | 0.05 | -0.84 | 0.53 | 0.02 q: | 0.05 | -0.85 | 0.53 | 0.02 q: | 0.05 | -0.85 | 0.53 | 0.02 q: | 0.05 | -0.85 | 0.53 | 0.02 q: | 0.05 | -0.85 | 0.52 | 0.02 q: | 0.05 | -0.85 | 0.52 | 0.02 q: | 0.05 | -0.85 | 0.52 | 0.02 q: | 0.05 | -0.86 | 0.52 | 0.02 q: | 0.05 | -0.86 | 0.51 | 0.02 q: | 0.05 | -0.86 | 0.51 | 0.02 q: | 0.05 | -0.86 | 0.51 | 0.02 q: | 0.05 | -0.86 | 0.51 | 0.02 q: | 0.05 | -0.86 | 0.5 | 0.02 q: | 0.05 | -0.86 | 0.5 | 0.02 q: | 0.05 | -0.87 | 0.5 | 0.02 q: | 0.05 | -0.87 | 0.5 | 0.02 q: | 0.05 | -0.87 | 0.49 | 0.02 q: | 0.05 | -0.87 | 0.49 | 0.02 q: | 0.05 | -0.87 | 0.49 | 0.02 q: | 0.05 | -0.87 | 0.49 | 0.02 q: | 0.05 | -0.87 | 0.48 | 0.02 q: | 0.05 | -0.87 | 0.48 | 0.02 q: | 0.05 | -0.88 | 0.48 | 0.02 q: | 0.05 | -0.88 | 0.48 | 0.02 q: | 0.05 | -0.88 | 0.47 | 0.02 q: | 0.05 | -0.88 | 0.47 | 0.02 q: | 0.05 | -0.88 | 0.47 | 0.02 q: | 0.05 | -0.88 | 0.47 | 0.02 q: | 0.04 | -0.88 | 0.47 | 0.02 q: | 0.04 | -0.88 | 0.46 | 0.02 q: | 0.04 | -0.89 | 0.46 | 0.02 q: | 0.04 | -0.89 | 0.46 | 0.02 q: | 0.04 | -0.89 | 0.46 | 0.02 q: | 0.04 | -0.89 | 0.45 | 0.02 q: | 0.04 | -0.89 | 0.45 | 0.02 q: | 0.04 | -0.89 | 0.45 | 0.02 q: | 0.04 | -0.89 | 0.45 | 0.02 q: | 0.04 | -0.89 | 0.45 | 0.02 q: | 0.04 | -0.89 | 0.44 | 0.02 q: | 0.04 | -0.9 | 0.44 | 0.02 q: | 0.04 | -0.9 | 0.44 | 0.02 q: | 0.04 | -0.9 | 0.44 | 0.02 q: | 0.04 | -0.9 | 0.44 | 0.02 q: | 0.04 | -0.9 | 0.43 | 0.02 q: | 0.04 | -0.9 | 0.43 | 0.02 q: | 0.04 | -0.9 | 0.43 | 0.02 q: | 0.04 | -0.9 | 0.43 | 0.02 q: | 0.04 | -0.9 | 0.42 | 0.02 q: | 0.04 | -0.91 | 0.42 | 0.02 q: | 0.04 | -0.91 | 0.42 | 0.01 q: | 0.04 | -0.91 | 0.42 | 0.01 q: | 0.04 | -0.91 | 0.42 | 0.01 q: | 0.04 | -0.91 | 0.41 | 0.01 q: | 0.04 | -0.91 | 0.41 | 0.01 q: | 0.04 | -0.91 | 0.41 | 0.01 q: | 0.04 | -0.91 | 0.41 | 0.01 q: | 0.04 | -0.91 | 0.41 | 0.01 q: | 0.04 | -0.91 | 0.4 | 0.01 q: | 0.04 | -0.91 | 0.4 | 0.01 q: | 0.04 | -0.92 | 0.4 | 0.01 q: | 0.04 | -0.92 | 0.4 | 0.01 q: | 0.03 | -0.92 | 0.4 | 0.01 q: | 0.03 | -0.92 | 0.4 | 0.01 q: | 0.03 | -0.92 | 0.39 | 0.01 q: | 0.03 | -0.92 | 0.39 | 0.01 q: | 0.03 | -0.92 | 0.39 | 0.01 q: | 0.03 | -0.92 | 0.39 | 0.01 q: | 0.03 | -0.92 | 0.39 | 0.01 q: | 0.03 | -0.92 | 0.38 | 0.01 q: | 0.03 | -0.92 | 0.38 | 0.01 q: | 0.03 | -0.92 | 0.38 | 0.01 q: | 0.03 | -0.93 | 0.38 | 0.01 q: | 0.03 | -0.93 | 0.38 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.37 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.36 | 0.01 q: | 0.03 | -0.93 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.35 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.34 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.94 | 0.33 | 0.01 q: | 0.03 | -0.95 | 0.32 | 0.01 q: | 0.03 | -0.95 | 0.32 | 0.01 q: | 0.03 | -0.95 | 0.32 | 0.01 q: | 0.02 | -0.95 | 0.32 | 0.01 q: | 0.02 | -0.95 | 0.32 | 0.01 q: | 0.02 | -0.95 | 0.32 | 0.01 q: | 0.02 | -0.95 | 0.32 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.31 | 0.01 q: | 0.02 | -0.95 | 0.3 | 0.01 q: | 0.02 | -0.95 | 0.3 | 0.01 q: | 0.02 | -0.95 | 0.3 | 0.01 | | | |
— You are receiving this because you are subscribed to this thread. Reply to this email directly, view it on GitHub https://github.com/kriswiner/nRF52832DevBoard/issues/5, or mute the thread https://github.com/notifications/unsubscribe-auth/AGY1qpK9S_FYjI0Jsev3odQxNkEaE77hks5uQo-5gaJpZM4V8CW4 .
Hi Kris,
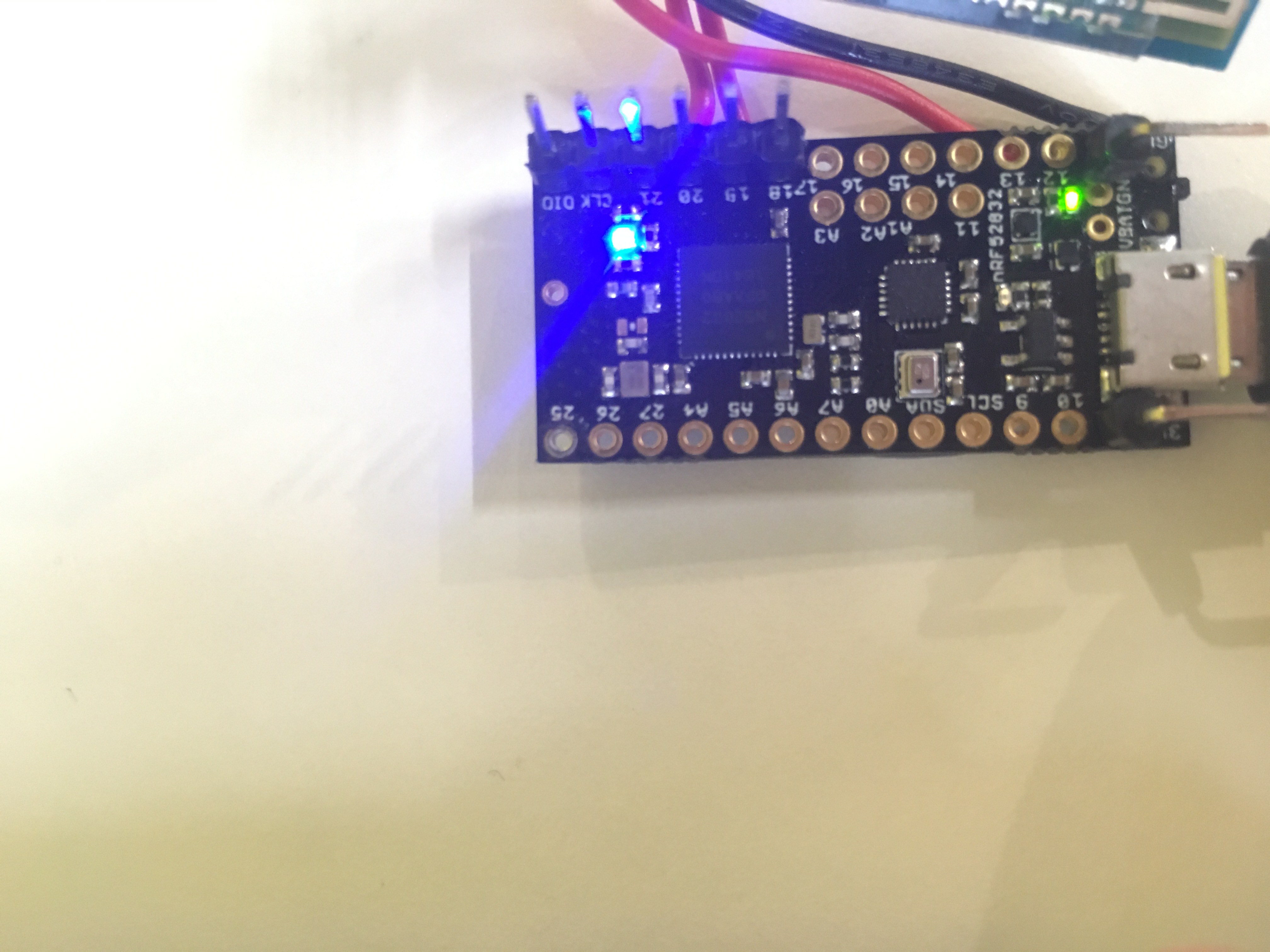
Thank you for your reply. I output the Euler angles and noticed that when I orient the board in this position (micro usb port is the bottom):
and the outputs are :
| euler: | -63.715427 | 0 | 180 | |
|---|---|---|---|---|
| q: | 0 | 0.85 | -0.52 | 0 |
It looks that the yaw (-63.7154) has some offset. Then I rotate 90 degrees clockwise, I get these values :
| euler: | -140.259 | 0 | 180 | |
|---|---|---|---|---|
| q: | 0 | 0.34 | -0.94 | 0 |
The relative measurement is correct, but is there a way to remove the offset ? I think it has to be done through the magnetometer but I am not sure how to do it. In addition, while calibrating the accelerometer and gyro, does the device need to be placed perfectly flat ? Thank you.
This is the result from my magnetometer calibration :
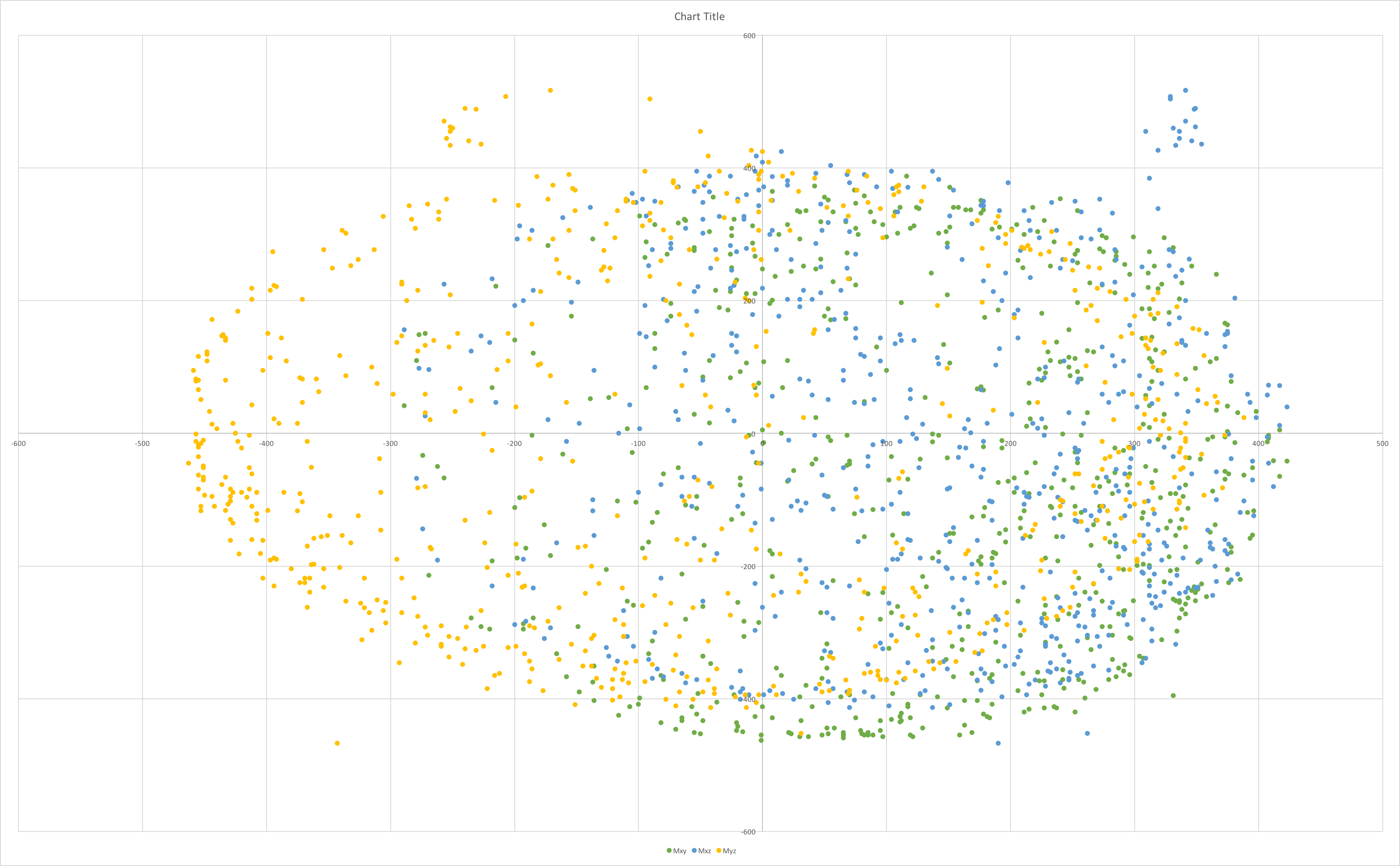
Do you think it is correct ? Because it looks like an ellipsoid rather than a sphere.
No, it doesn;t look too good. Keep trying, sample for longer times and move the device to sample more of the response surface.
On Wed, Aug 15, 2018 at 2:38 AM radleypr [email protected] wrote:
This is the result from my magnetometer calibration :
[image: picture1] https://user-images.githubusercontent.com/40554862/44142144-e381ed84-a0b1-11e8-97b4-10c0870311e1.png
Do you think it is correct ? Because it looks like an ellipsoid rather than a sphere.
— You are receiving this because you commented. Reply to this email directly, view it on GitHub https://github.com/kriswiner/nRF52832DevBoard/issues/5#issuecomment-413146395, or mute the thread https://github.com/notifications/unsubscribe-auth/AGY1qkxyIhkoazM7dnDfa8V_bzWFW052ks5uQ-wugaJpZM4V8CW4 .
The Euler angles are absolute position wrt true North. If you orienta the boar to point North you should get 0 degrees heading (just like a compass) with a small offset depending on the local magnetic declination. In the partof California I am in it is ~14 degrees. You can correct in your code for your local declination. Once the correction is made, the device will show 0 degree heading when pointed North. And you can choose which edge of the board is North by how you feed the sensor data to the fusion filter. The filter expects the data as NED (north, East, down. So you can choose which accel axis is North, for example and then adjust the sensor data feed accordingly to make any board edge give 0 degree heading when pointed North.
On Wed, Aug 15, 2018 at 12:42 AM radleypr [email protected] wrote:
Hi Kris,
Thank you for your reply. I output the Euler angles and noticed that when I orient the board in this position :
[image: img_3671] https://user-images.githubusercontent.com/40554862/44136867-f7fc21e6-a0a0-11e8-8662-b2cef8f5c117.JPG and the outputs are :
euler: -63.715427 0 180 q: 0 0.85 -0.52 It looks that the yaw (-63.7154) has some offset. Then I rotate 90 degrees clockwise, I get these values : euler: -140.259 0 180 q: 0 0.34 -0.94 0
The relative measurement is correct, but is there a way to remove the offset ? I think it has to be done through the magnetometer but I am not sure how to do it. In addition, while calibrating the accelerometer and gyro, does the device need to be placed perfectly flat ? Thank you.
— You are receiving this because you commented. Reply to this email directly, view it on GitHub https://github.com/kriswiner/nRF52832DevBoard/issues/5#issuecomment-413119775, or mute the thread https://github.com/notifications/unsubscribe-auth/AGY1qkjchEc-poD43Z5yrRzIo9Q4nPPYks5uQ9DrgaJpZM4V8CW4 .
Should I increase the number of magnetometer calibration ? Is it okay to move the magnetometer randomly in 8 shaped figures during the calibration or it has to be similar movements ?
Yes, increase the time for mag calibration, and yes, move randonly in all of 3 space. Sample the entire spherical response surface multiple times..
On Wed, Aug 15, 2018 at 11:28 AM radleypr [email protected] wrote:
Should I increase the number of magnetometer calibration ? Is it okay to move the magnetometer randomly in 8 shaped figures during the calibration or it has to be similar movements ?
— You are receiving this because you commented. Reply to this email directly, view it on GitHub https://github.com/kriswiner/nRF52832DevBoard/issues/5#issuecomment-413290994, or mute the thread https://github.com/notifications/unsubscribe-auth/AGY1qtst0CMZjgYfbjkxXFntL_Y8kl5Sks5uRGhRgaJpZM4V8CW4 .
I see, thanks Kris for the explanation. Is it possible to correct the magnetic declination inside the quaternion ? Because I want to use the quaternion to avoid the gimbal lock from euler angle and yaw pitch roll.
I see, thanks Kris for the explanation. Is it possible to correct the magnetic declination inside the quaternion ? Because I want to use the quaternion to avoid the gimbal lock from euler angle and yaw pitch roll.
This makes no sense. If you derive the Euler angles from quaternions you won;t have gimbal lock. You must correct decination on the heading directly.
On Wed, Aug 15, 2018 at 11:43 AM radleypr [email protected] wrote:
I see, thanks Kris for the explanation. Is it possible to correct the magnetic declination inside the quaternion ? Because I want to use the quaternion to avoid the gimbal lock from euler angle and yaw pitch roll.
— You are receiving this because you commented. Reply to this email directly, view it on GitHub https://github.com/kriswiner/nRF52832DevBoard/issues/5#issuecomment-413295440, or mute the thread https://github.com/notifications/unsubscribe-auth/AGY1qvG2rELNhzeOrTvo5HOxS4ZSKKt7ks5uRGvKgaJpZM4V8CW4 .