How does SUMO realize that the vehicles on the congested middle road change lanes to the left and right road at the maximum speed?
Add your issue description here. There are three roads, of which the middle road is congested, and the left and right roads are driven at the maximum speed. How does SUMO realize that the vehicles on the middle road change lanes to the left and right? I tried Traci.vehicle.changeLane(Car_id, lane_index, duration) and this method doesn't work. Do you have a better way? Thank you If possible, upload an example that shows your problem.
SUMO-version:
operating system:
by "three roads" do you mean "three 3 lanes of the same edge" or actually three different edges?
“三条路”是指“同一边的三个 3 车道”还是实际上是三个不同的边?
The speed of vehicles in the left lane and the right lane is 15m/s, and the middle lane is crowded due to the accident of the yellow vehicle, resulting in a queue. My ultimate goal is to simulate real traffic (in reality, some of the vehicles in the queue will change lanes, resulting in a capacity reduction of bottlenecks). Do you have any good way to do this? @namdre
I'm really sorry, these questions really bother me: 1. How to use traci to verify whether traci.vehicle.changeLane(car_id, lane_id, duration) is successful? 2. How should the duration of the changeLane method be designed, and how much should it be designed to ensure that the lane can be changed to a road with free-flowing vehicles? 3. When changing lanes, how should the behavior of the following vehicles in the target lane be portrayed? @namdre
- just call vehicle.getLane to check whether the lane was changed
- setting a bigger 'duration' is generally useful if the target lane has traffic on it and cooperation is needed (i.e. for opening up a gap in traffic). After a successful you could shorten the duration by issuing an changeLane command with a very short duration
- by default, the follower vehicles will perform cooperative speed adjustments (i.e. braking) to help the vehicle with the changeLane command merge.
- 只需调用 vehicle.getLane 即可检查车道是否已更改
- 如果目标车道上有车流并且需要合作(即打开车流间隙),则设置更大的“持续时间”通常很有用。成功后,您可以通过发出持续时间很短的 changeLane 命令来缩短持续时间
- 默认情况下,跟随车辆将执行协同速度调整(即制动)以帮助车辆与 changeLane 命令合并。
 In my traffic XML file, set lanechange.duration="10.0".
And I use the traci interface for lane change control: traci.vehicle.changeLane('vehicle-id', 0, 1),
but the following car still doesn't slow down Braking, still unable to change lanes
In my traffic XML file, set lanechange.duration="10.0".
And I use the traci interface for lane change control: traci.vehicle.changeLane('vehicle-id', 0, 1),
but the following car still doesn't slow down Braking, still unable to change lanes
- 只需调用 vehicle.getLane 即可检查车道是否已更改
- 如果目标车道上有车流并且需要合作(即打开车流间隙),则设置更大的“持续时间”通常很有用。成功后,您可以通过发出持续时间很短的 changeLane 命令来缩短持续时间
- 默认情况下,跟随车辆将执行协同速度调整(即制动)以帮助车辆与 changeLane 命令合并。
In my traffic XML file, set lanechange.duration="10.0".
And I use the traci interface for lane change control: traci.vehicle.changeLane('vehicle-id', 0, 1),
but the following car still doesn't slow down Braking, still unable to change lanes
@namdre According to your guidance, the lane change problem is still not resolved, the above comment is my setting
I also encounter this problem. I set long duration. But it still can't change lane.
I also encounter this problem. I set long duration. But it still can't change lane.
can you attach a minimal scenario that shows your problem?
With the default SL2015 model, the cars are all blocking only one lane. I tried to adjust the parameters but it didn't solve the problem very well.
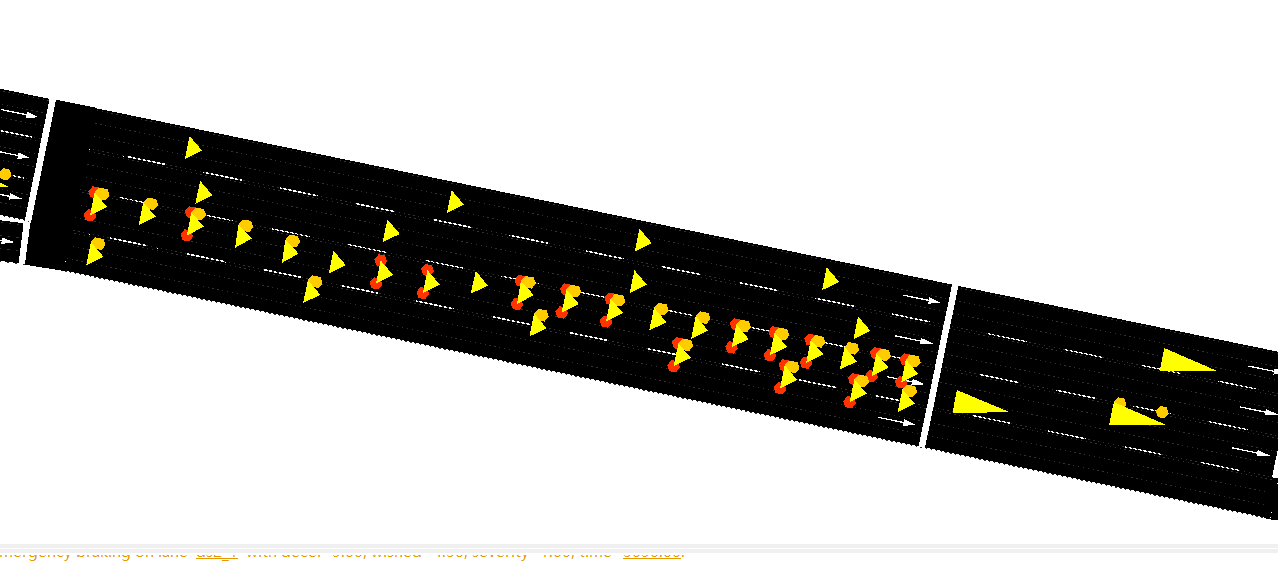 These are the parameters I have tried
These are the parameters I have tried

Please help me!