deepdrive-sim

deepdrive-sim copied to clipboard
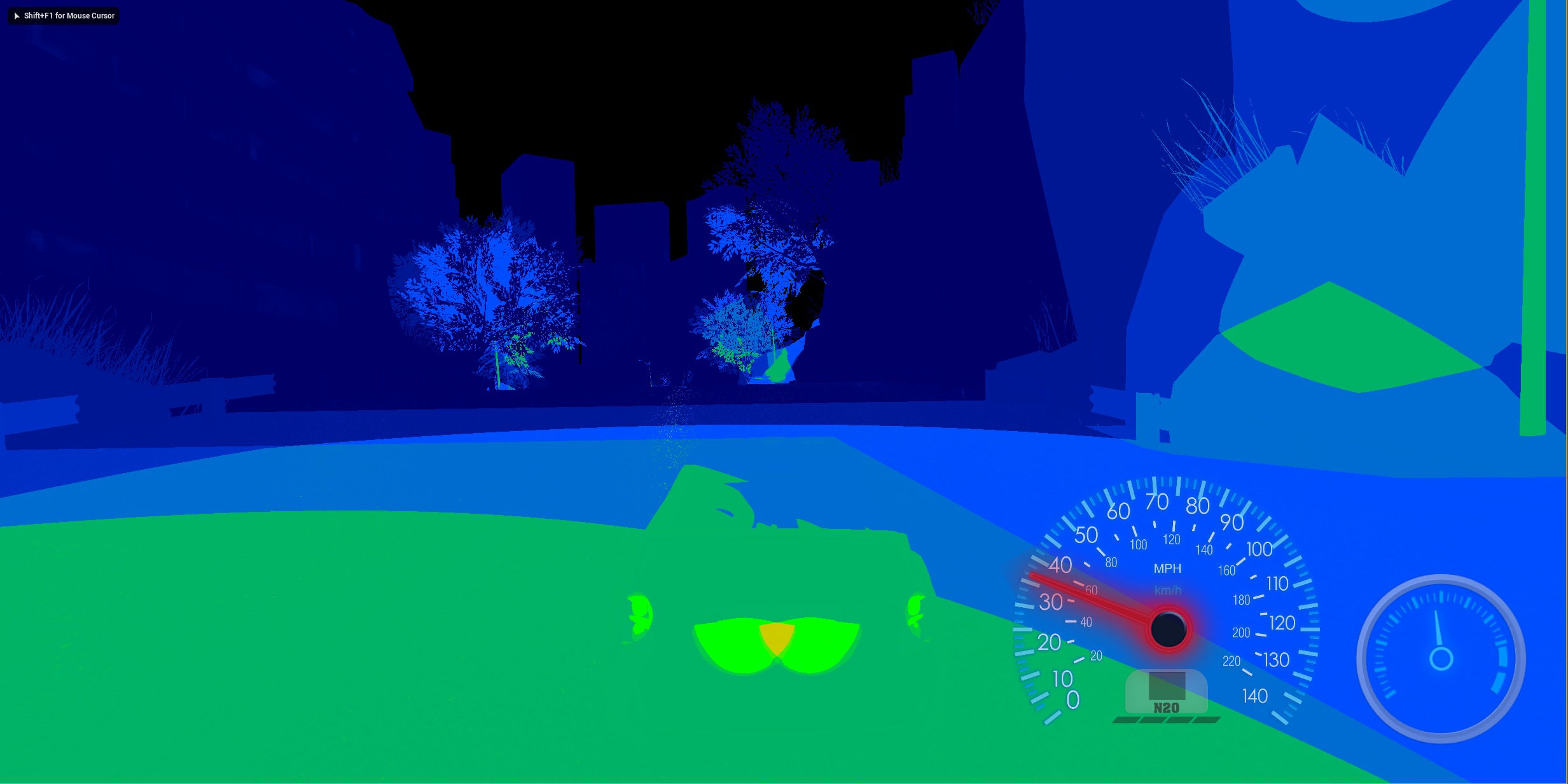
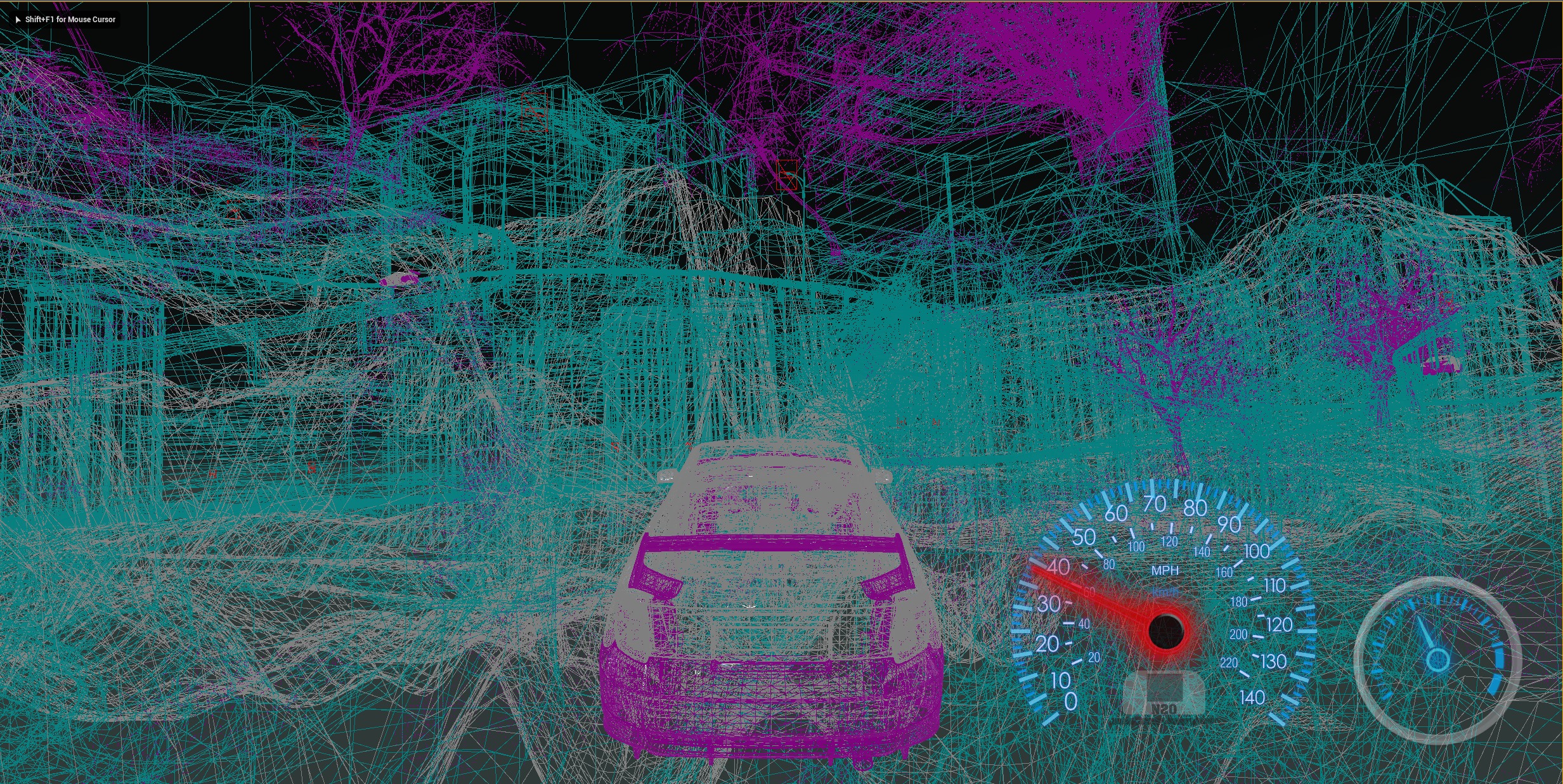
Allow randomizing view mode and "scalability" visual settings to increase visual variation
We should enable wide variation in camera output to encourage domain randomization within agents trained on camera data. Like start position and other domain-randomization features, this should be controlled by a random seed that can be passed via Python.
Examples