New ROSbot PROTO with associated devices PROTOs
Implementation of the ROSbot PROTO in Webots.
The robot embeds the following sensors which are also created as PROTO files:
-
AstraRGBD Camera. -
RpLidarA2Lidar. -
Mpu-9250Inertial Measurement Unit (IMU).
As a quick first review, it seems that some meshes are too much faceted. We should smooth them. I believe this can be done in Blender on the OBJ files.
.obj files now all have a smooth shading applied to them.
Thank you, that's nice. However, I still have a few comments on the 3D models, like the wheels now look weird, the connectors should have a different color from the body, etc. However, I believe it is simpler that I show them to you one-by-one.
The PR is again ready for review. The ROSbot PROTO has been significantly improved visually. Any feedback to improve the documentation and the sample world is welcome.
It looks very good to me, thank you. I just noticed strange triangle patterns on the red body of the robot which was not present in the previous version I believe:
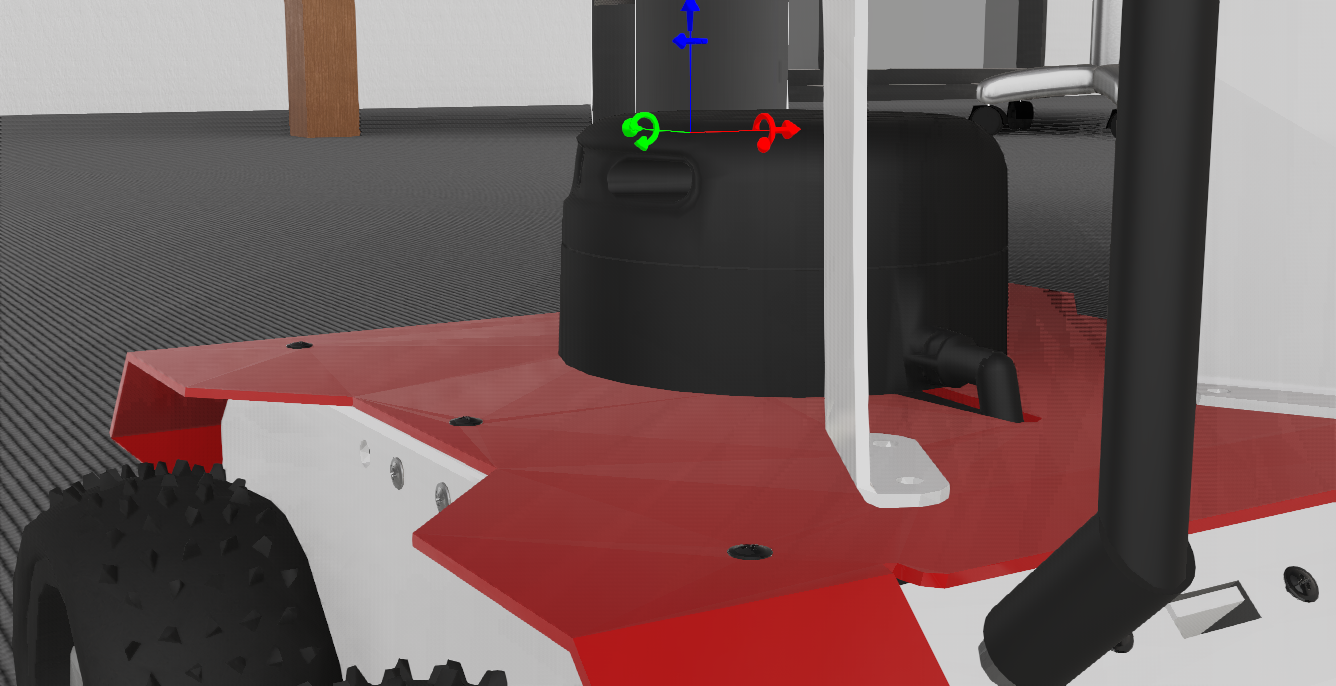 Could this be caused by the modified UV mapping?
Could this be caused by the modified UV mapping?
I fixed the reflection problem on the top red part of the robot. I also applied the same solution to the wheel rims and it improved a lot the mapping of the aluminium visually.
The solution is to select all the corresponding faces of the Mesh in Blender and to "UV unwrap faces". It allows to apply the texture to a flat mapping which compensates for edges between triangles.
It looks very nice now. Thank you. There are still pending comments on this PR to be addressed.