RPE with point_distance or translation_part on GPS-Groundtruth
Hello, first of all, thank you for this amazing tool!
I'm trying to compare different VO-Trajectories with the ground truth and want to know the RPE on a length of 10m.
Ground Truth is from a GNSS-Receiver and looks like this:
1651770106.8475585 -0.14921146002598107 0.05015757493674755 -0.0010000000000047748 0 0 0 1
--> no rotation
My VO-Output looks like this:
1651770111.32129 0.005011624537694329 -0.05010951952130711 0.17754394190477732 4.4806884713440946e-05 -0.0006594576718184086 8.101223193114939e-05 0.9999997782724455
--> with rotation
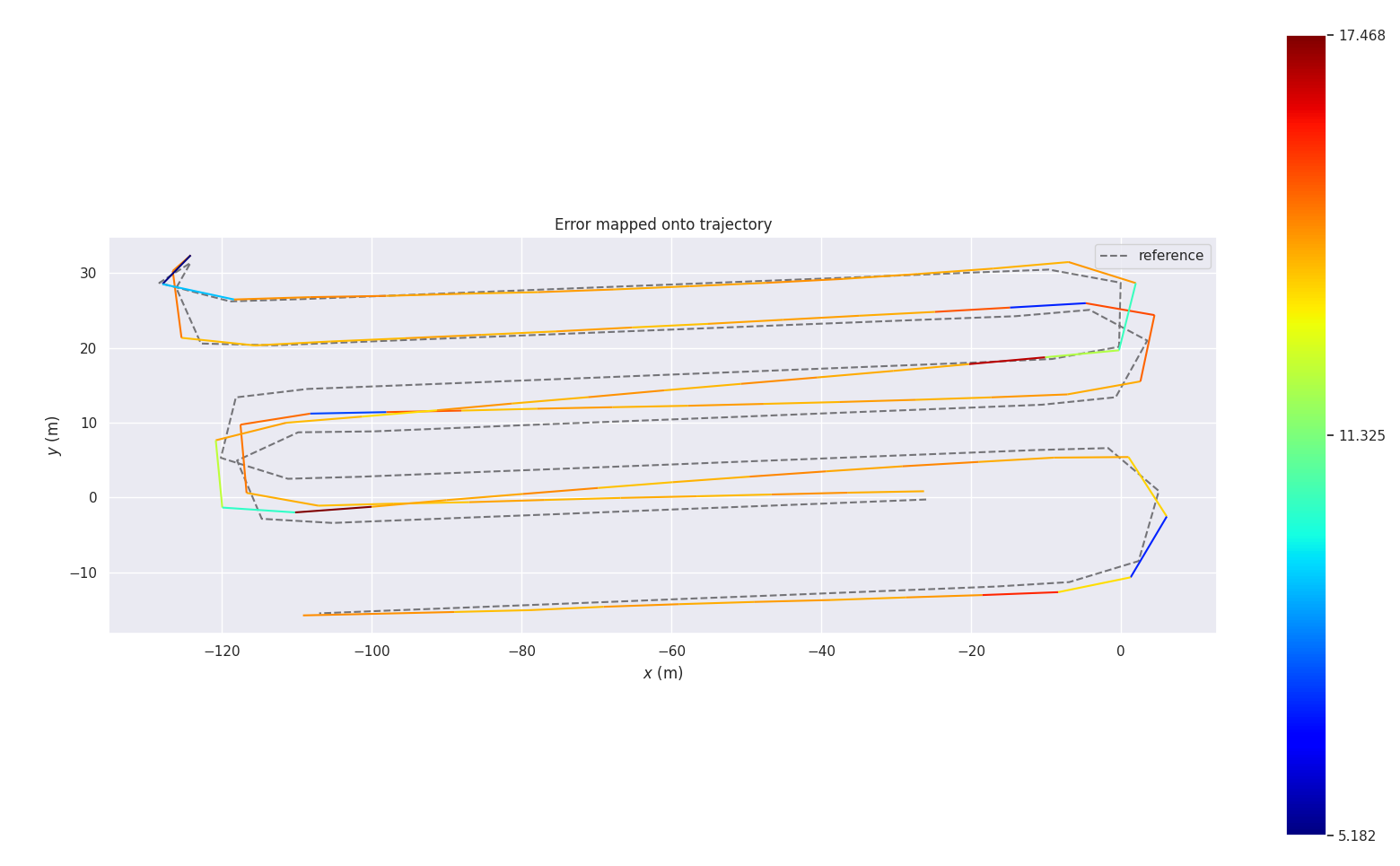
Now if I use RPE with only the translation part (evo_rpe tum -a -p -d 10 -u m -r trans_part -v ...) I have a mean error of 13m.
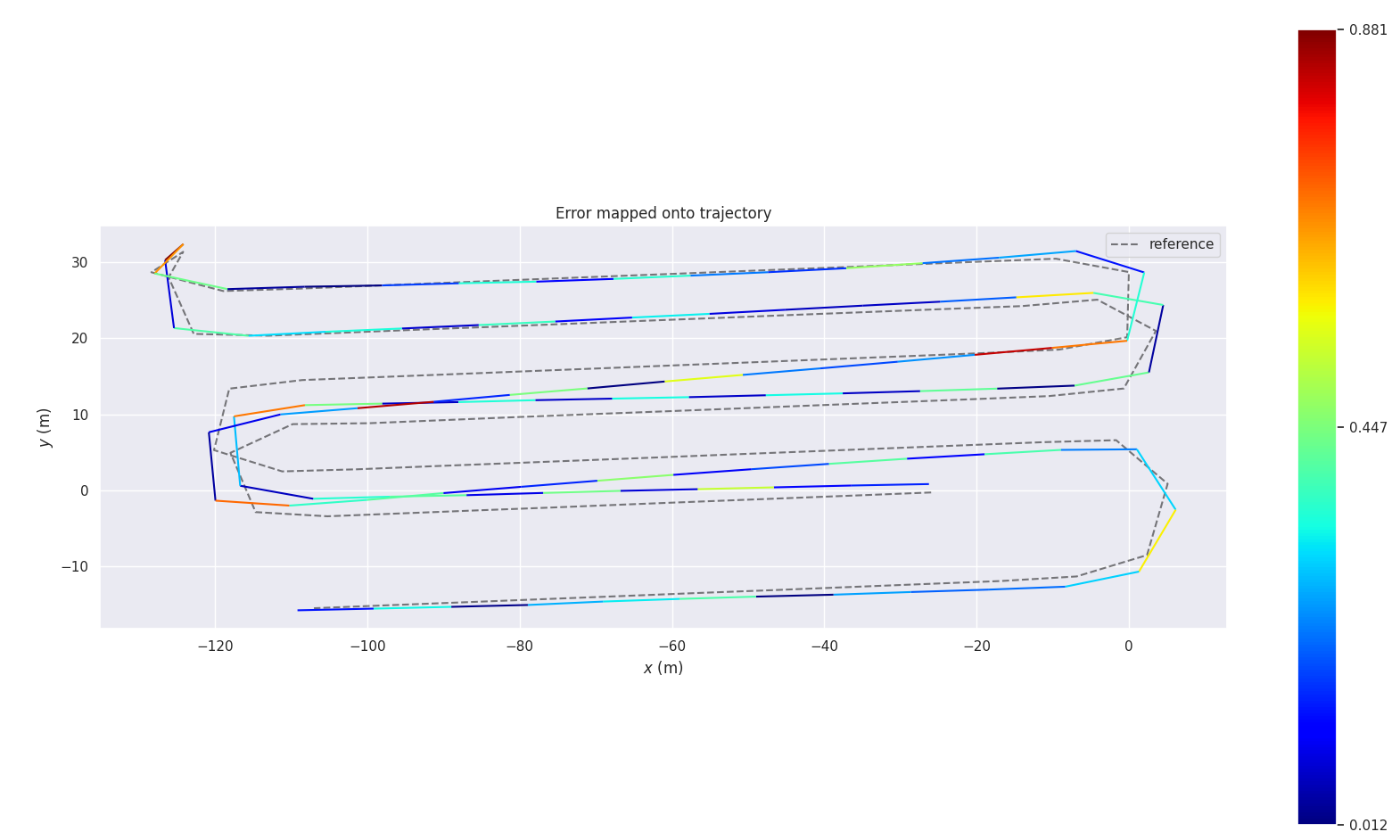
If I use RPE with point distance on the same data (evo_rpe tum -a -p -d 10 -u m -r point_distance -v ...) I have a mean error of only 0.28m.
Questions: In your jupyter-notebook you say that e.g. for GPS data the point-distance is a good option ... but why is the difference in mean error that high? What metric should I use? What is the "real" error here?
Thank you very much!