The point cloud from a depth camera vibrates as the robot moves
Hello,
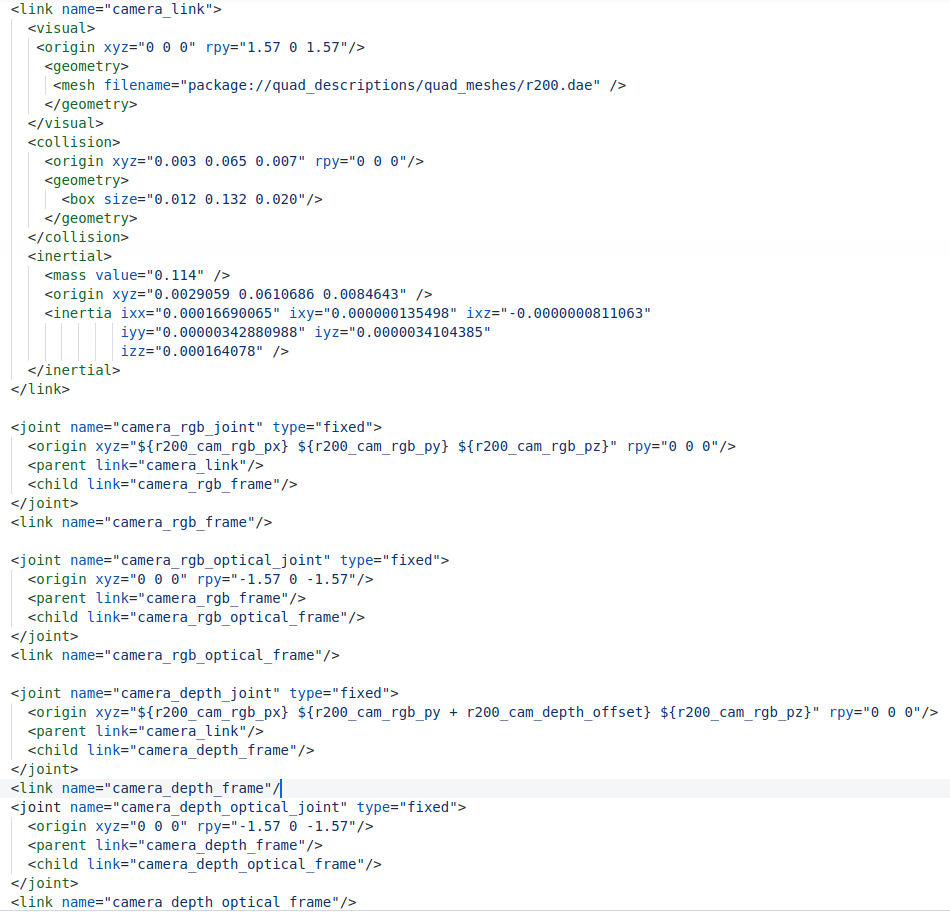
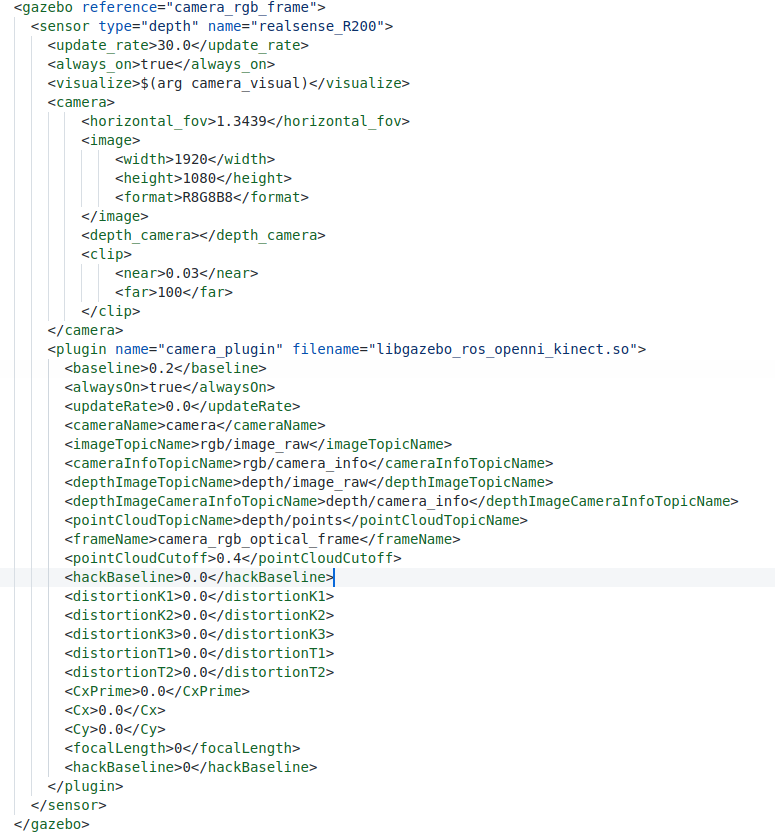
I'm implementing this package with a quadruped robot. I'm using it in the Gazebo simulation. The input source is point clouds generated by a depth camera. Here are my camera configurations in the robot description files:
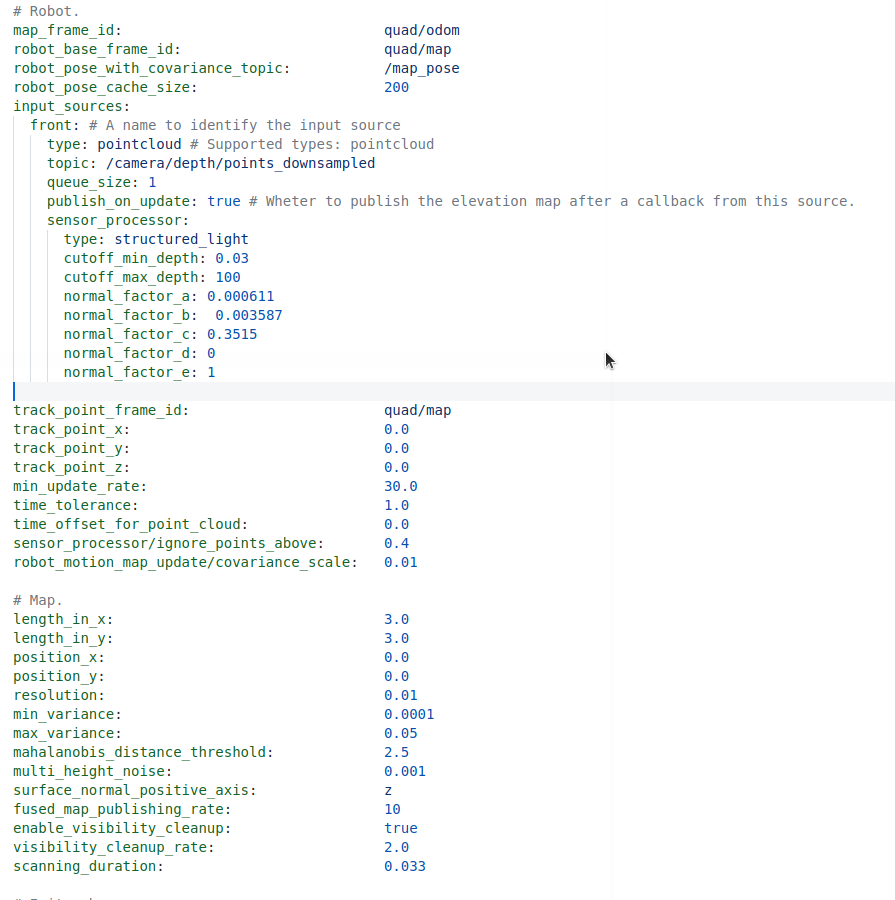
My elevation map configurations:
The problem is that the point cloud keeps vibrating when the robot moves in Gazebo, as shown in the following video. This vibration has given me inaccurate mapping.
https://user-images.githubusercontent.com/96481145/175096270-30c6febf-2567-4818-a45a-f9fd2df956d6.mp4
I couldn't figure out what causes the vibration. I appreciate your help.
I found this answer https://answers.ros.org/question/338112/vibrating-point-cloud-in-rviz/?answer=338308#post-id-338308. I'm not sure how the "elevation_mapping" package subscribes to "/tf". Is there any buffer used?
I think the pose estimation works fine. I used "rtabmap_ros" to publish poses at 5.0 hz.
Hi @maximilianwulf, regarding this issue, I tried to search for answers from some other examples. I found in this repository, that the point cloud obtained from the depth camera is also vibrating with the robot moving, as indicated in this gif. I was thinking maybe this is normal? I wonder if you could check if this happens with your quadruped robot using the present elevation mapping package. I apologize in advance if this is an inappropriate request.
Hi @maximilianwulf, thanks for your reply. I re-upload the two videos, one for the example I mentioned in my last comment (the first one) and one for my own simulation scenario (the second one). This is my very first project on slam, so I don't know whether the point cloud (or laser scan) vibration is acceptable. I really appreciate your help.
https://user-images.githubusercontent.com/96481145/177156439-d47cc489-774e-4c54-b781-69e01cc29f63.mp4
https://user-images.githubusercontent.com/96481145/177156457-9a038ca4-936c-4a8a-bc18-89f51fc3cba0.mp4
Can you maybe upload a gif? The video's are corrupt on my machine.
Sorry about that. Please see the following gif files.
Ah, now I can see it. That looks like the state estimation of your robot is jittery.
Elevation mapping just subscribes to the information and does its calculations. I would recommend fixing the state estimation, instead of trying to fix it within elevation mapping.