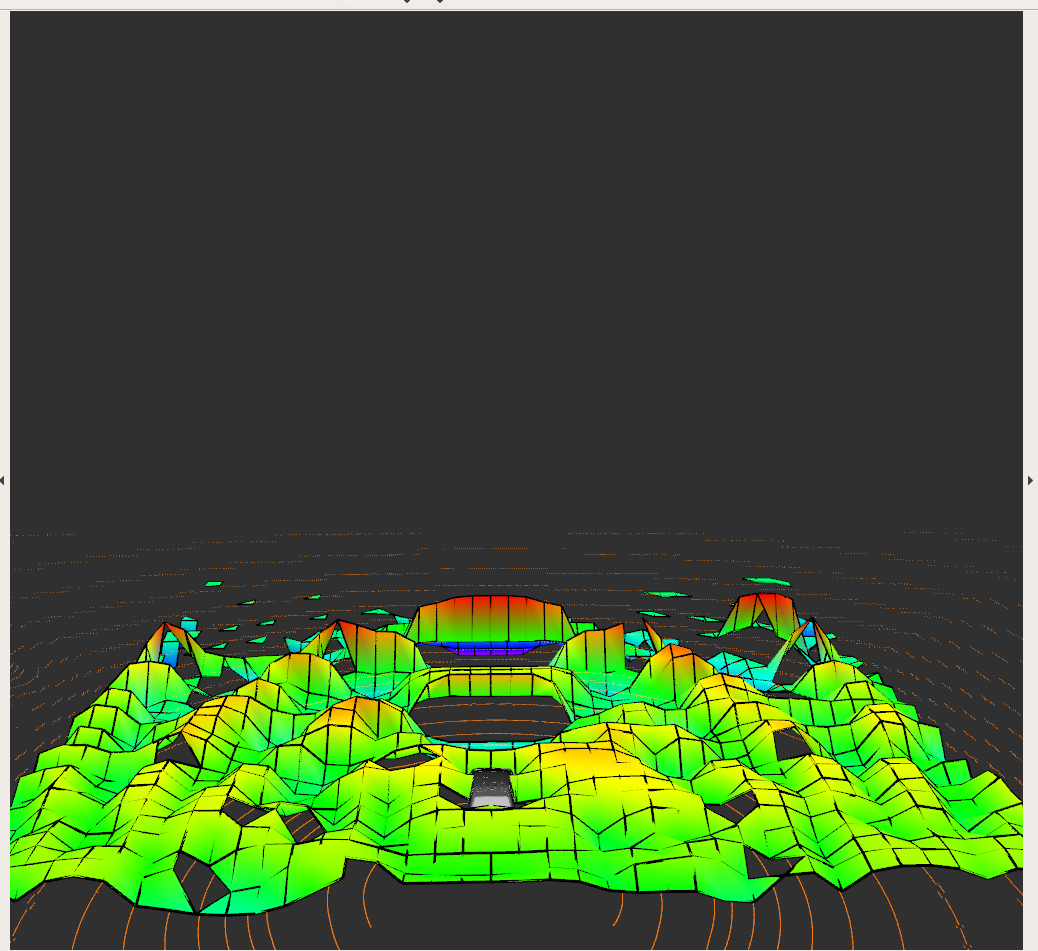
Instant pose changes result in noisy output
Hello, Thank you sharing such a great work publicly.
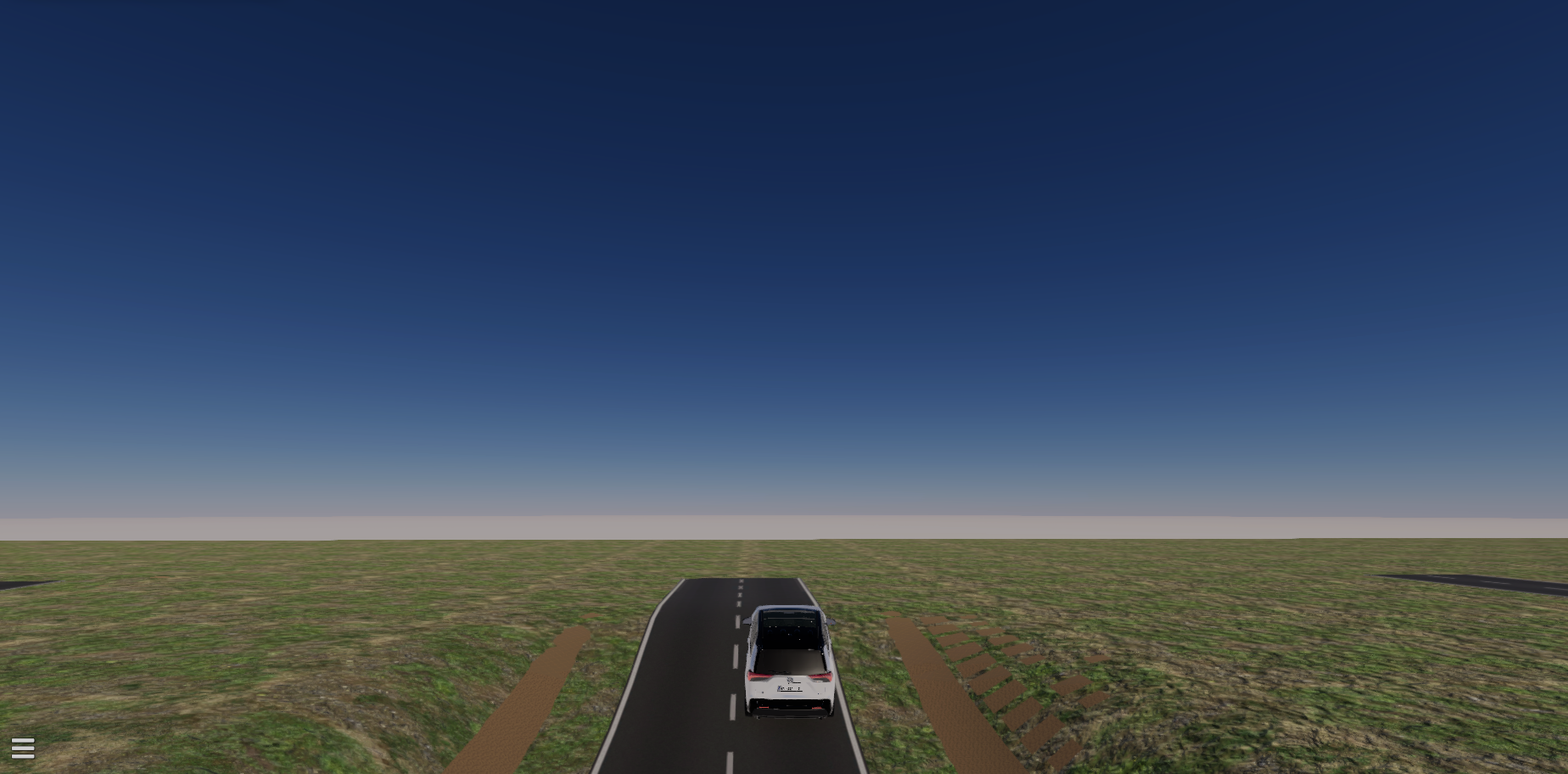
I try to employ this work for an autonomous car project. I test the elevation map results with simulation data. I realized that when the pose of the vehicle changes rapidly, elevation map is filled with noisy data. For instance, as you can see in the pictures, when my car instantly goes up from a hole, many grids are set to incorrect values. We expect a flat elevation map surface since the ground is flat but it is not like that. Do you have any idea about this issue? What could be the reason/problem behind this?
I suppose that the point cloud and current pose are not synchronized. I implemented a synchronizer for this purpose but it did not help. I get point cloud data with 10 Hz and current pose 30 Hz. Thank you in advance.
Hey @melodytr, yes that can be expected output. Are we looking at the fused elevation map or the raw one?
There are different things you can do:
- Find some postprocessors that alleviate the issue.
- Double-check that all time information is correct, filtering the map only makes sense if the timestamps are correct.
Hi, I am looking at the fused elevation map. It is expected, okay, but why? What is the root cause of this issue? As I said earlier, I implemented a synchronizer between current pose and input point cloud to get the best matched ones considering their timestamps. I suppose that time information is correct otherwise I guess that such incorrect elevation output would be observed constantly. About post-processor, do you have any suggestion? I am not an expert on this topic. Thank you again.
Best, Melody
Hi @melodytr, I've met the same problem when implementing this package with my quadruped robot. Have you solved it?
Thanks, Ruby
Does it work for you with the turtle bot demo? There might be several reasons for this. Hard to say from just the pictures.
https://github.com/ANYbotics/elevation_mapping#turtlebot3-waffle-simulation